 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeProgrammatic Reward Design by Example
Paper and Code
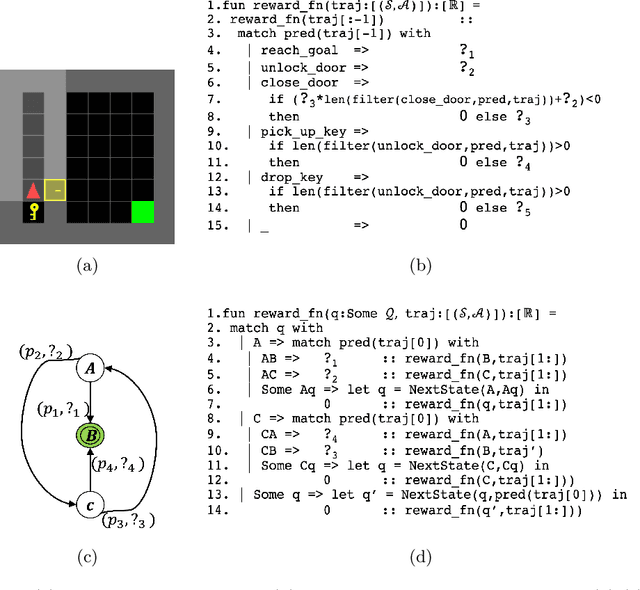
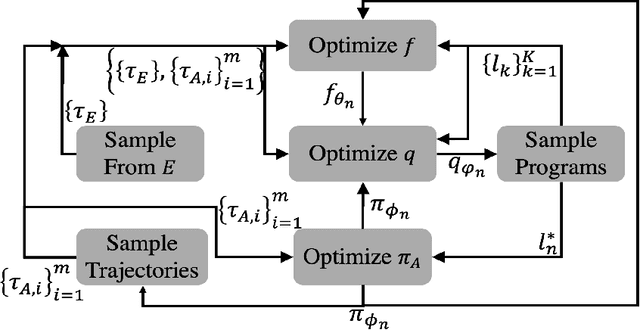
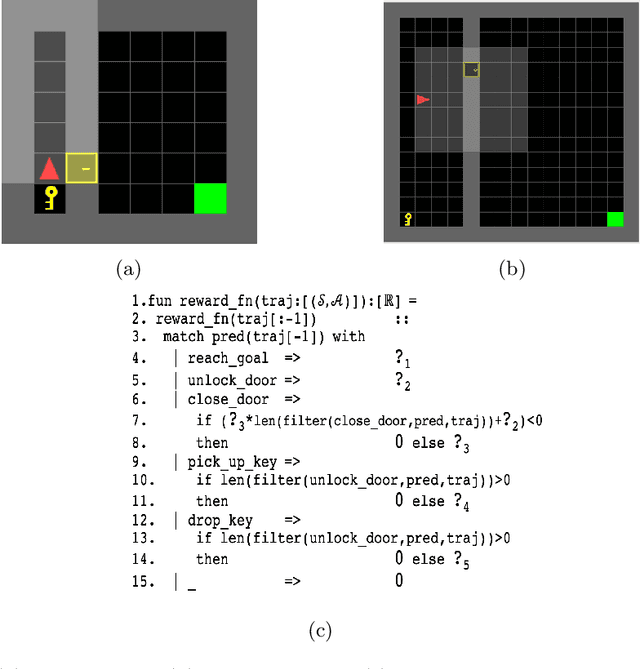
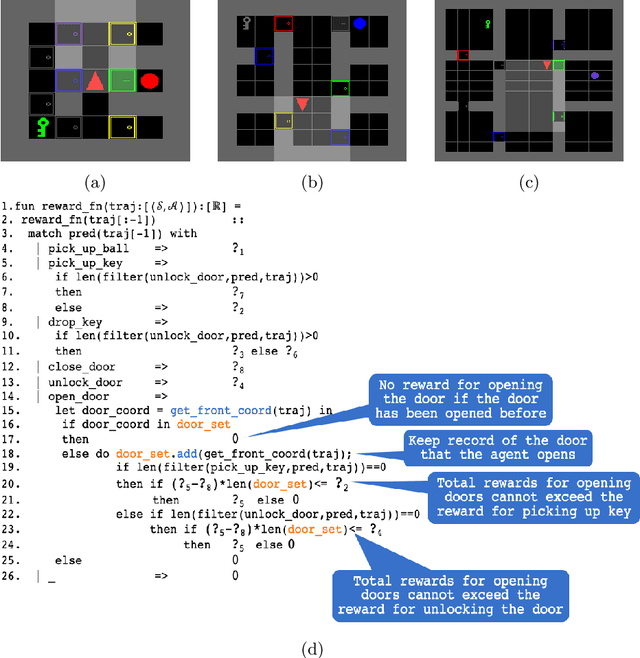
Reward design is a fundamental problem in reinforcement learning (RL). A misspecified or poorly designed reward can result in low sample efficiency and undesired behaviors. In this paper, we propose the idea of programmatic reward design, i.e. using programs to specify the reward functions in RL environments. Programs allow human engineers to express sub-goals and complex task scenarios in a structured and interpretable way. The challenge of programmatic reward design, however, is that while humans can provide the high-level structures, properly setting the low-level details, such as the right amount of reward for a specific sub-task, remains difficult. A major contribution of this paper is a probabilistic framework that can infer the best candidate programmatic reward function from expert demonstrations. Inspired by recent generative-adversarial approaches, our framework searches for the most likely programmatic reward function under which the optimally generated trajectories cannot be differentiated from the demonstrated trajectories. Experimental results show that programmatic reward functionslearned using this framework can significantly outperform those learned using existing reward learning algo-rithms, and enable RL agents to achieve state-of-the-artperformance on highly complex tasks.