 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePROBE: Predictive Robust Estimation for Visual-Inertial Navigation
Paper and Code
Aug 02, 2017


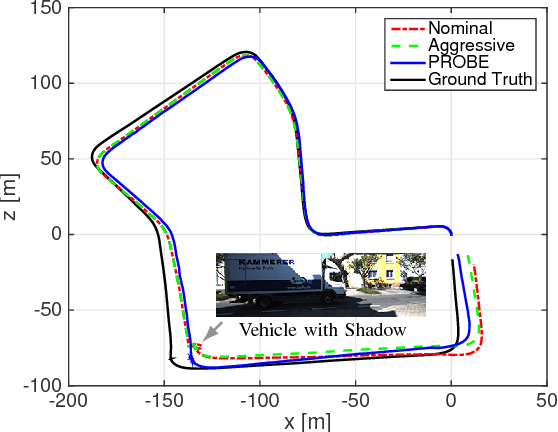
Navigation in unknown, chaotic environments continues to present a significant challenge for the robotics community. Lighting changes, self-similar textures, motion blur, and moving objects are all considerable stumbling blocks for state-of-the-art vision-based navigation algorithms. In this paper we present a novel technique for improving localization accuracy within a visual-inertial navigation system (VINS). We make use of training data to learn a model for the quality of visual features with respect to localization error in a given environment. This model maps each visual observation from a predefined prediction space of visual-inertial predictors onto a scalar weight, which is then used to scale the observation covariance matrix. In this way, our model can adjust the influence of each observation according to its quality. We discuss our choice of predictors and report substantial reductions in localization error on 4 km of data from the KITTI dataset, as well as on experimental datasets consisting of 700 m of indoor and outdoor driving on a small ground rover equipped with a Skybotix VI-Sensor.