 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeProbabilistic Solutions To Ordinary Differential Equations As Non-Linear Bayesian Filtering: A New Perspective
Paper and Code
Oct 08, 2018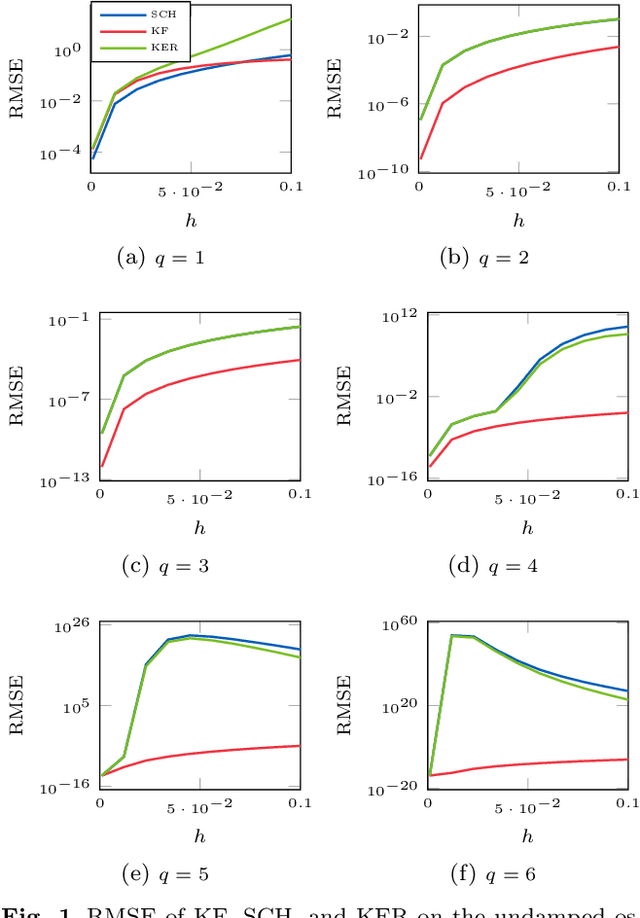
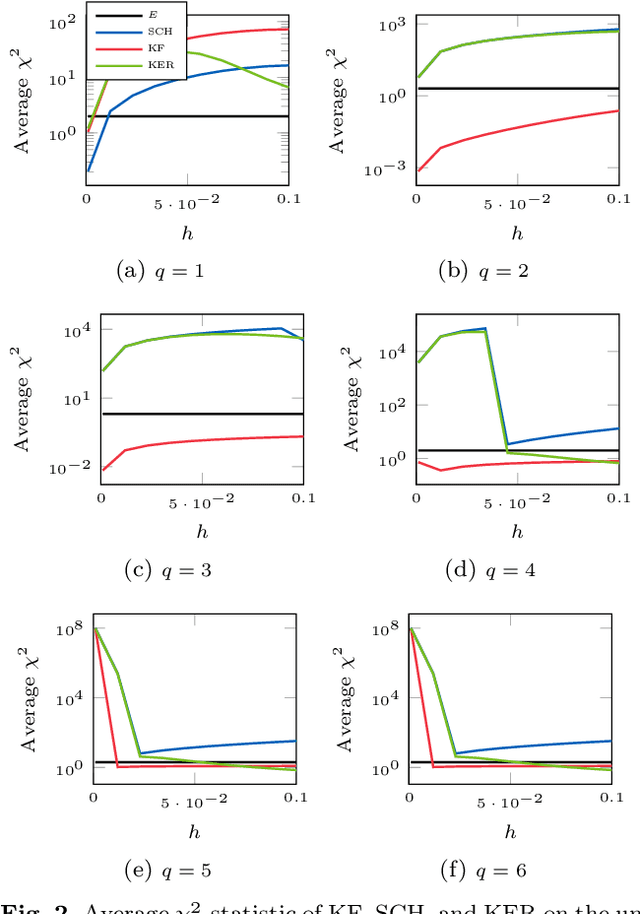
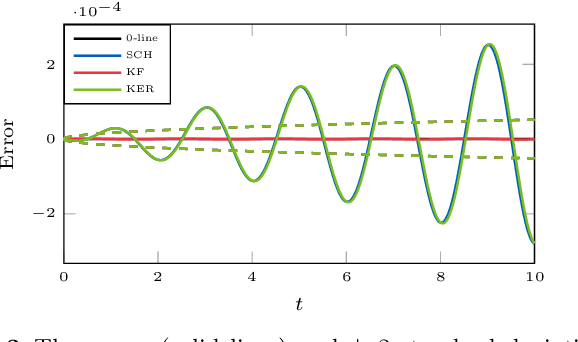
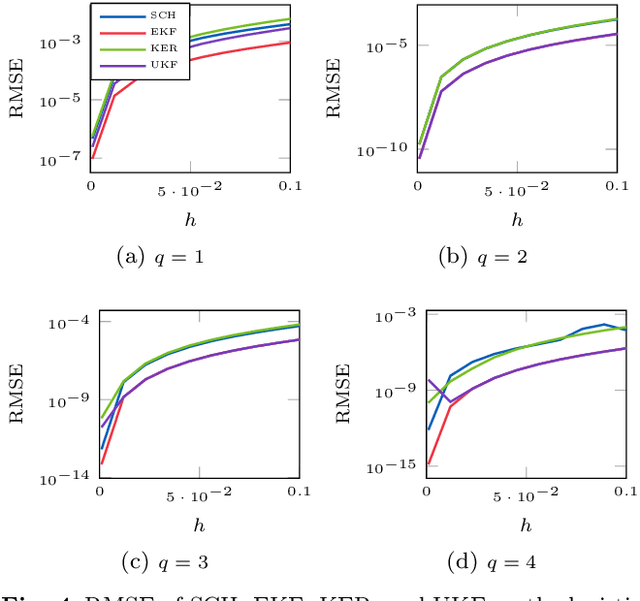
We formulate probabilistic numerical approximations to solutions of ordinary differential equations (ODEs) as problems in Gaussian process (GP) regression with non-linear measurement functions. This is achieved by defining the measurement sequence to consists of the observations of the difference between the derivative of the GP and the vector field evaluated at the GP---which are all identically zero at the solution of the ODE. When the GP has a state-space representation, the problem can be reduced to a Bayesian state estimation problem and all widely-used approximations to the Bayesian filtering and smoothing problems become applicable. Furthermore, all previous GP-based ODE solvers, which were formulated in terms of generating synthetic measurements of the vector field, come out as specific approximations. We derive novel solvers, both Gaussian and non-Gaussian, from the Bayesian state estimation problem posed in this paper and compare them with other probabilistic solvers in illustrative experiments.