 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeProbabilistic Relational Planning with First Order Decision Diagrams
Paper and Code
Jan 16, 2014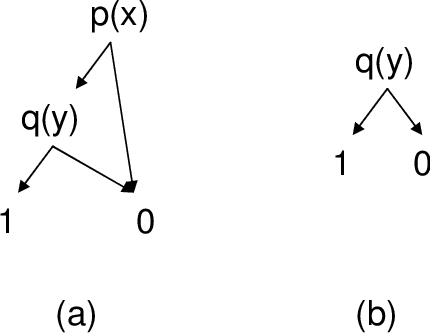
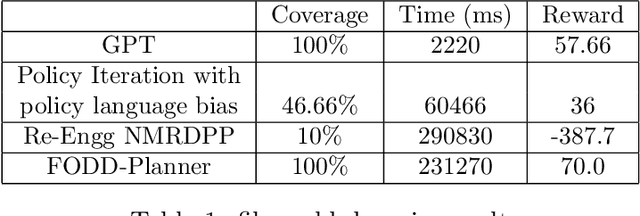


Dynamic programming algorithms have been successfully applied to propositional stochastic planning problems by using compact representations, in particular algebraic decision diagrams, to capture domain dynamics and value functions. Work on symbolic dynamic programming lifted these ideas to first order logic using several representation schemes. Recent work introduced a first order variant of decision diagrams (FODD) and developed a value iteration algorithm for this representation. This paper develops several improvements to the FODD algorithm that make the approach practical. These include, new reduction operators that decrease the size of the representation, several speedup techniques, and techniques for value approximation. Incorporating these, the paper presents a planning system, FODD-Planner, for solving relational stochastic planning problems. The system is evaluated on several domains, including problems from the recent international planning competition, and shows competitive performance with top ranking systems. This is the first demonstration of feasibility of this approach and it shows that abstraction through compact representation is a promising approach to stochastic planning.