 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeProbabilistic Diffeomorphic Registration: Representing Uncertainty
Paper and Code
Jan 12, 2017
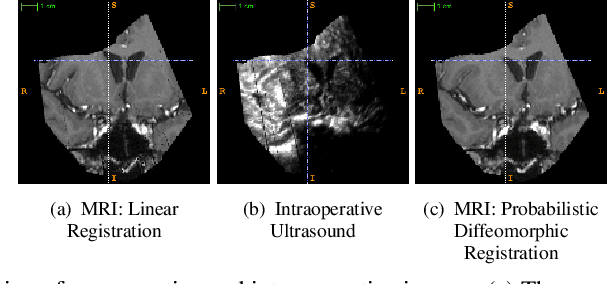
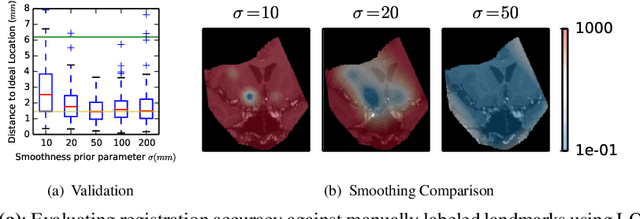
This paper presents a novel mathematical framework for representing uncertainty in large deformation diffeomorphic image registration. The Bayesian posterior distribution over the deformations aligning a moving and a fixed image is approximated via a variational formulation. A stochastic differential equation (SDE) modeling the deformations as the evolution of a time-varying velocity field leads to a prior density over deformations in the form of a Gaussian process. This permits estimating the full posterior distribution in order to represent uncertainty, in contrast to methods in which the posterior is approximated via Monte Carlo sampling or maximized in maximum a-posteriori (MAP) estimation. The frame-work is demonstrated in the case of landmark-based image registration, including simulated data and annotated pre and intra-operative 3D images.