 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeProbabilistic DAG Search
Paper and Code
Jun 16, 2021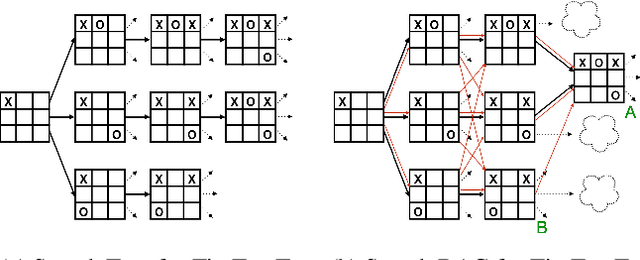
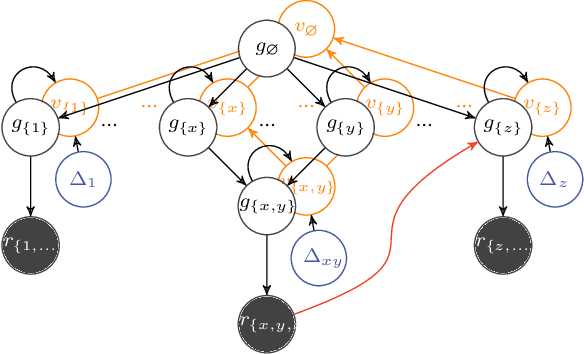
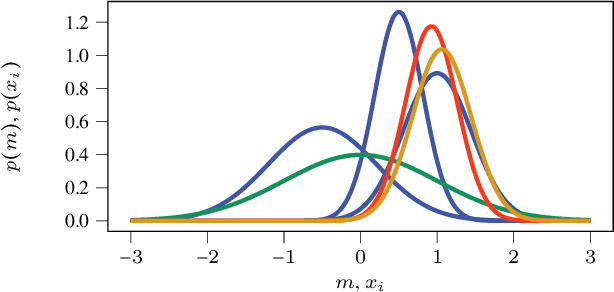
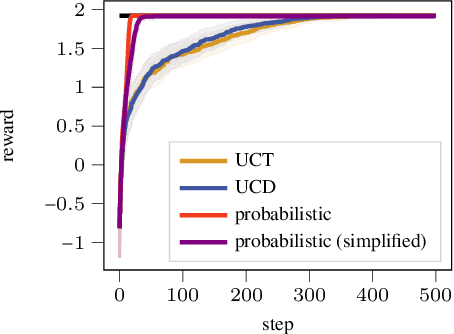
Exciting contemporary machine learning problems have recently been phrased in the classic formalism of tree search -- most famously, the game of Go. Interestingly, the state-space underlying these sequential decision-making problems often posses a more general latent structure than can be captured by a tree. In this work, we develop a probabilistic framework to exploit a search space's latent structure and thereby share information across the search tree. The method is based on a combination of approximate inference in jointly Gaussian models for the explored part of the problem, and an abstraction for the unexplored part that imposes a reduction of complexity ad hoc. We empirically find our algorithm to compare favorably to existing non-probabilistic alternatives in Tic-Tac-Toe and a feature selection application.