Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeProbabilistic Combination of Noisy Points and Planes for RGB-D Odometry
Paper and Code
May 18, 2017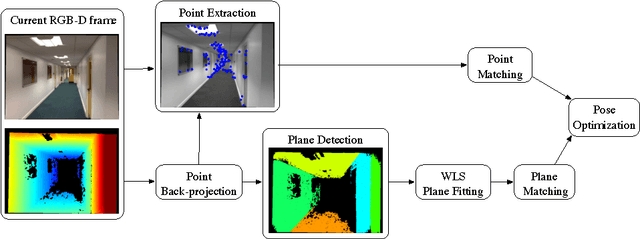
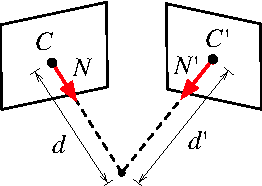

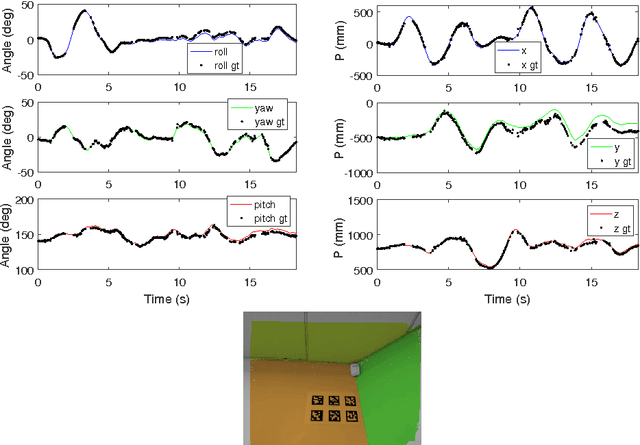
This work proposes a visual odometry method that combines points and plane primitives, extracted from a noisy depth camera. Depth measurement uncertainty is modelled and propagated through the extraction of geometric primitives to the frame-to-frame motion estimation, where pose is optimized by weighting the residuals of 3D point and planes matches, according to their uncertainties. Results on an RGB-D dataset show that the combination of points and planes, through the proposed method, is able to perform well in poorly textured environments, where point-based odometry is bound to fail.
* Accepted to TAROS 2017
View paper on