 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePrediction of the Position of External Markers Using a Recurrent Neural Network Trained With Unbiased Online Recurrent Optimization for Safe Lung Cancer Radiotherapy
Paper and Code
Jun 02, 2021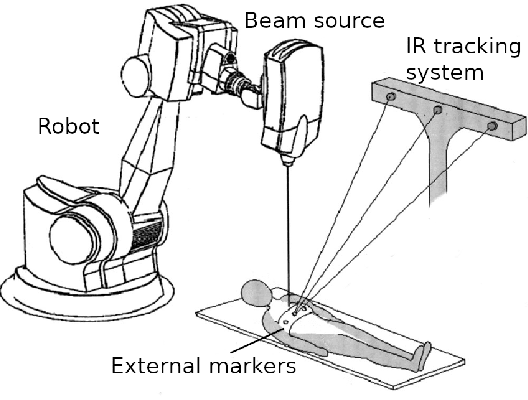
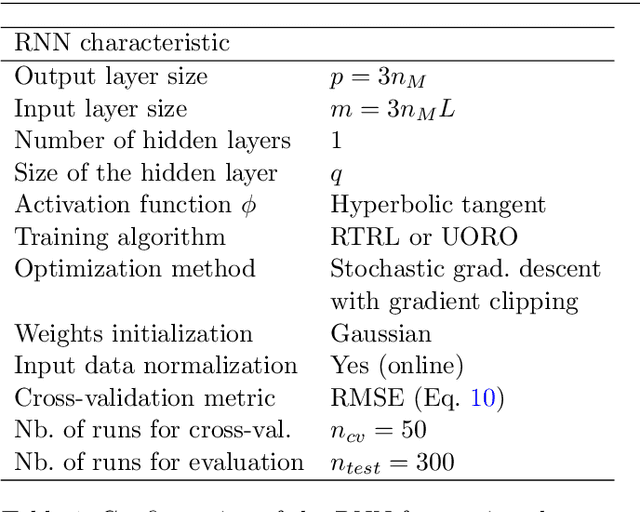
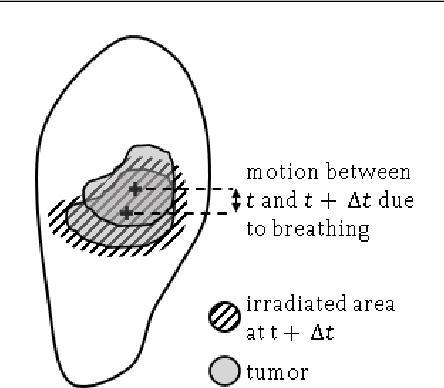
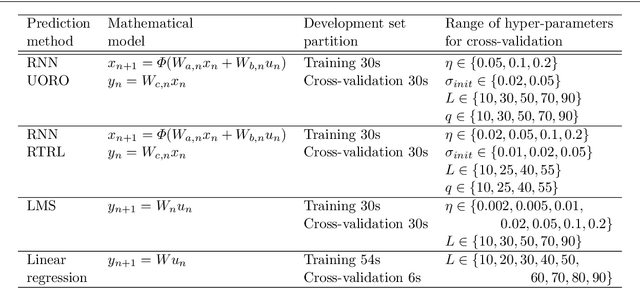
During lung cancer radiotherapy, the position of infrared reflective objects on the chest can be recorded to estimate the tumor location. However, radiotherapy systems usually have a latency inherent to robot control limitations that impedes the radiation delivery precision. Not taking this phenomenon into account may cause unwanted damage to healthy tissues and lead to side effects such as radiation pneumonitis. In this research, we use nine observation records of the three-dimensional position of three external markers on the chest and abdomen of healthy individuals breathing during intervals from 73s to 222s. The sampling frequency is equal to 10Hz and the amplitudes of the recorded trajectories range from 6mm to 40mm in the superior-inferior direction. We forecast the location of each marker simultaneously with a horizon value (the time interval in advance for which the prediction is made) between 0.1s and 2.0s, using a recurrent neural network (RNN) trained with unbiased online recurrent optimization (UORO). We compare its performance with an RNN trained with real-time recurrent learning, least mean squares (LMS), and offline linear regression. Training and cross-validation are performed during the first minute of each sequence. On average, UORO achieves the lowest root-mean-square (RMS) and maximum error, equal respectively to 1.3mm and 8.8mm, with a prediction time per time step lower than 2.8ms (Dell Intel core i9-9900K 3.60Ghz). Linear regression has the lowest RMS error for the horizon values 0.1s and 0.2s, followed by LMS for horizon values between 0.3s and 0.5s, and UORO for horizon values greater than 0.6s.