 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePrediction of Human Full-Body Movements with Motion Optimization and Recurrent Neural Networks
Paper and Code
Oct 04, 2019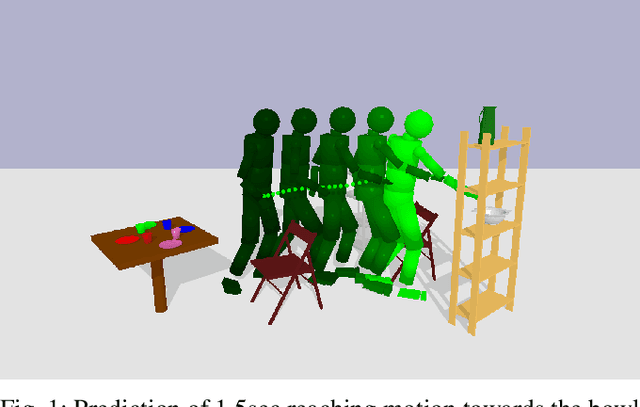
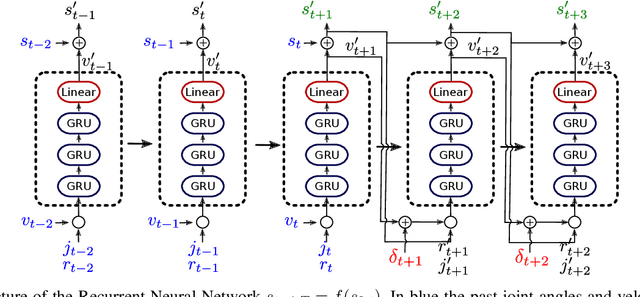

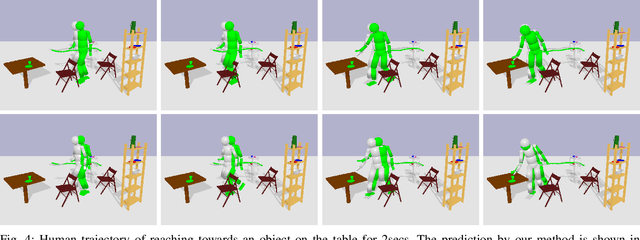
Human movement prediction is difficult as humans naturally exhibit complex behaviors that can change drastically from one environment to the next. In order to alleviate this issue, we propose a prediction framework that decouples short-term prediction, linked to internal body dynamics, and long-term prediction, linked to the environment and task constraints. In this work we investigate encoding short-term dynamics in a recurrent neural network, while we account for environmental constraints, such as obstacle avoidance, using gradient-based trajectory optimization. Experiments on real motion data demonstrate that our framework improves the prediction with respect to state-of-the-art motion prediction methods, as it accounts to beforehand unseen environmental structures. Moreover we demonstrate on an example, how this framework can be used to plan robot trajectories that are optimized to coordinate with a human partner.