 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePredicting Rigid Body Dynamics using Dual Quaternion Recurrent Neural Networks with Quaternion Attention
Paper and Code
Nov 17, 2020

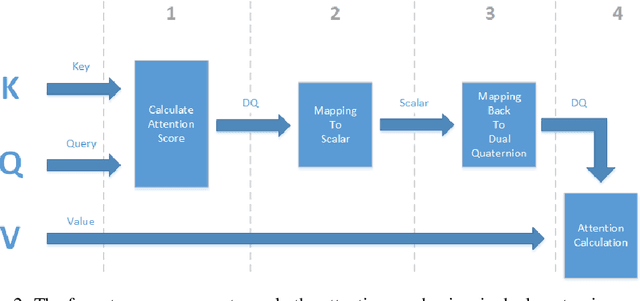

We propose a novel neural network architecture based on dual quaternions which allow for a compact representation of informations with a main focus on describing rigid body movements. To cover the dynamic behavior inherent to rigid body movements, we propose recurrent architectures in the neural network. To further model the interactions between individual rigid bodies as well as external inputs efficiently, we incorporate a novel attention mechanism employing dual quaternion algebra. The introduced architecture is trainable by means of gradient based algorithms. We apply our approach to a parcel prediction problem where a rigid body with an initial position, orientation, velocity and angular velocity moves through a fixed simulation environment which exhibits rich interactions between the parcel and the boundaries.