 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePredicting non-linear dynamics by stable local learning in a recurrent spiking neural network
Paper and Code
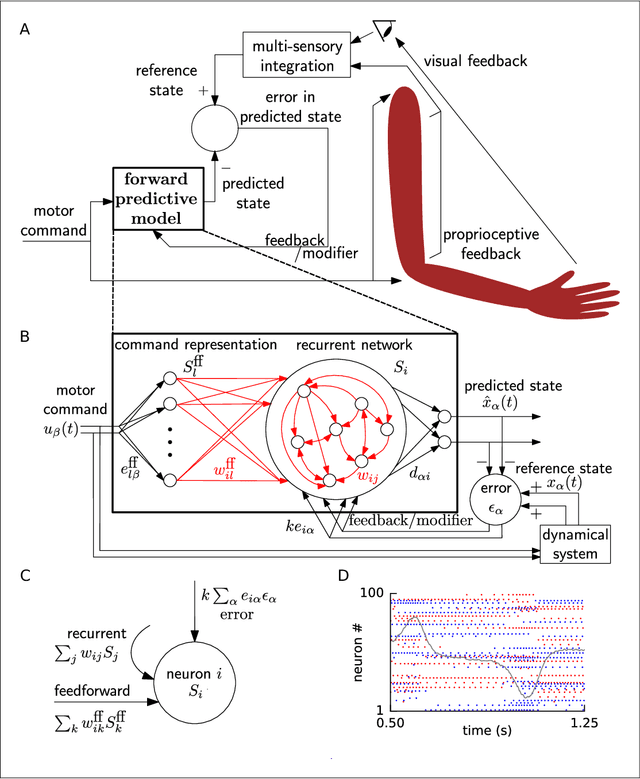
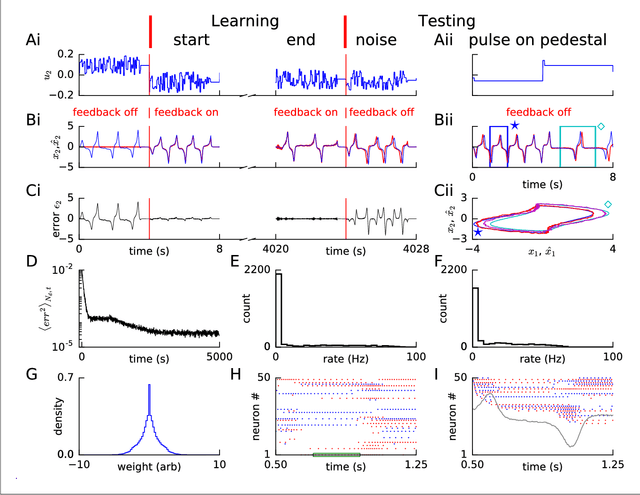

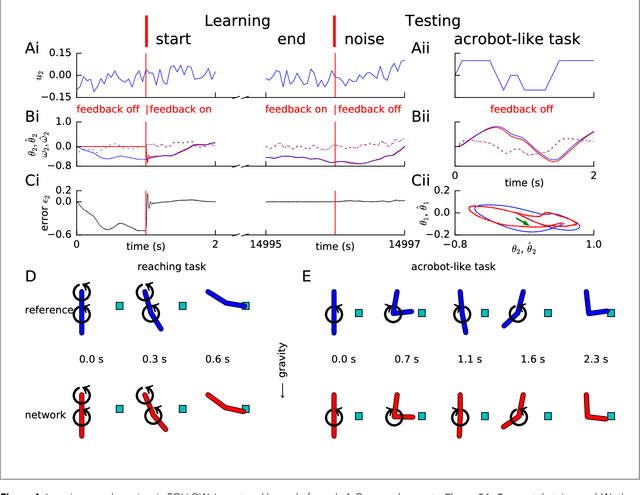
Brains need to predict how the body reacts to motor commands. It is an open question how networks of spiking neurons can learn to reproduce the non-linear body dynamics caused by motor commands, using local, online and stable learning rules. Here, we present a supervised learning scheme for the feedforward and recurrent connections in a network of heterogeneous spiking neurons. The error in the output is fed back through fixed random connections with a negative gain, causing the network to follow the desired dynamics, while an online and local rule changes the weights. The rule for Feedback-based Online Local Learning Of Weights (FOLLOW) is local in the sense that weight changes depend on the presynaptic activity and the error signal projected onto the postsynaptic neuron. We provide examples of learning linear, non-linear and chaotic dynamics, as well as the dynamics of a two-link arm. Using the Lyapunov method, and under reasonable assumptions and approximations, we show that FOLLOW learning is stable uniformly, with the error going to zero asymptotically.