 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePosteriori Probabilistic Bounds of Convex Scenario Programs with Validation Tests
Paper and Code
Mar 27, 2019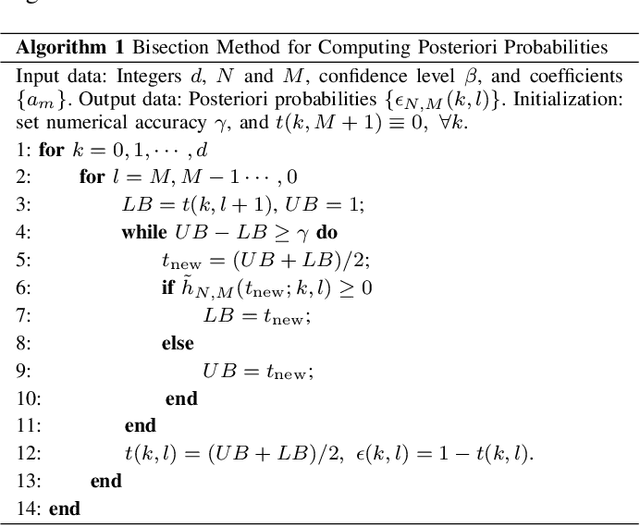
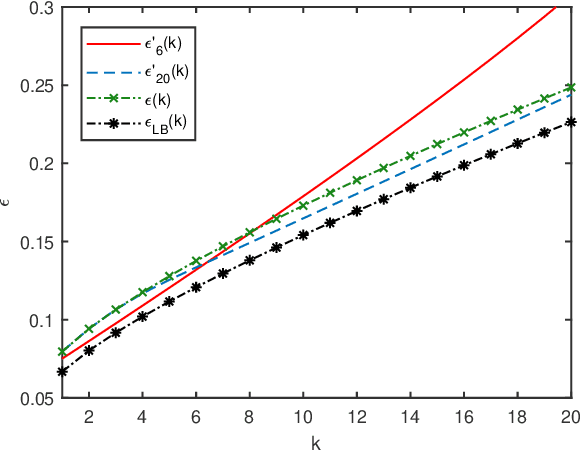
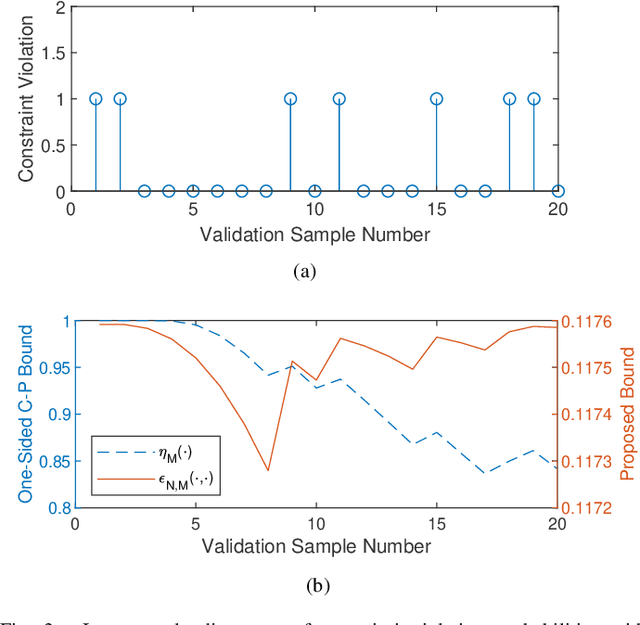
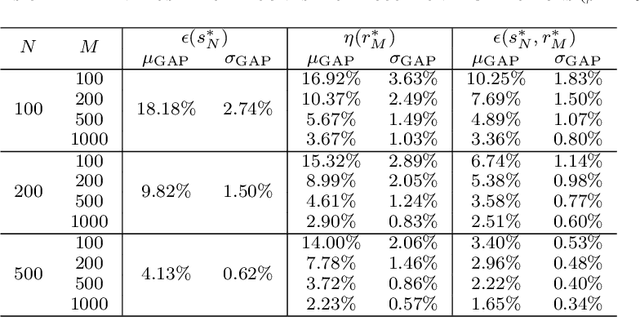
Scenario programs have established themselves as efficient tools towards decision-making under uncertainty. To assess the quality of scenario-based solutions a posteriori, validation tests based on Bernoulli trials have been widely adopted in practice. However, to reach a theoretically reliable conclusion, one typically needs to collect massive validation samples. In this work, we propose new posteriori bounds for convex scenario programs with validation tests, which are dependent on both realizations of support constraints and performance on out-of-sample validation data. The proposed bounds enjoy wide generality in that many existing theoretical results can be incorporated as particular cases. To facilitate practical use, a systematic approach for parameterizing posteriori probability functions is also developed, which is shown to possess a variety of desirable properties allowing for easy implementations and clear interpretations. By synthesizing information about support constraints and validation tests, less conservative estimates of reliability levels can be attained for randomized solutions in comparison with existing posteriori bounds. Case studies on controller design of aircraft lateral motion are presented to validate the effectiveness of the proposed posteriori bounds.