 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePose Uncertainty Aware Movement Synchrony Estimation via Spatial-Temporal Graph Transformer
Paper and Code
Aug 01, 2022


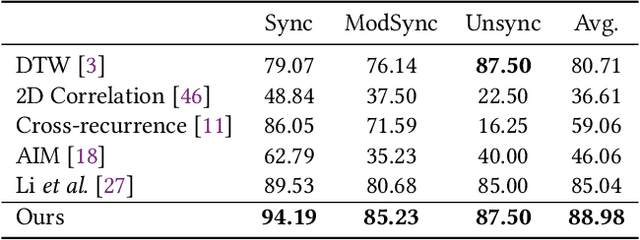
Movement synchrony reflects the coordination of body movements between interacting dyads. The estimation of movement synchrony has been automated by powerful deep learning models such as transformer networks. However, instead of designing a specialized network for movement synchrony estimation, previous transformer-based works broadly adopted architectures from other tasks such as human activity recognition. Therefore, this paper proposed a skeleton-based graph transformer for movement synchrony estimation. The proposed model applied ST-GCN, a spatial-temporal graph convolutional neural network for skeleton feature extraction, followed by a spatial transformer for spatial feature generation. The spatial transformer is guided by a uniquely designed joint position embedding shared between the same joints of interacting individuals. Besides, we incorporated a temporal similarity matrix in temporal attention computation considering the periodic intrinsic of body movements. In addition, the confidence score associated with each joint reflects the uncertainty of a pose, while previous works on movement synchrony estimation have not sufficiently emphasized this point. Since transformer networks demand a significant amount of data to train, we constructed a dataset for movement synchrony estimation using Human3.6M, a benchmark dataset for human activity recognition, and pretrained our model on it using contrastive learning. We further applied knowledge distillation to alleviate information loss introduced by pose detector failure in a privacy-preserving way. We compared our method with representative approaches on PT13, a dataset collected from autism therapy interventions. Our method achieved an overall accuracy of 88.98% and surpassed its counterparts by a wide margin while maintaining data privacy.