 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePose Augmentation: Class-agnostic Object Pose Transformation for Object Recognition
Paper and Code


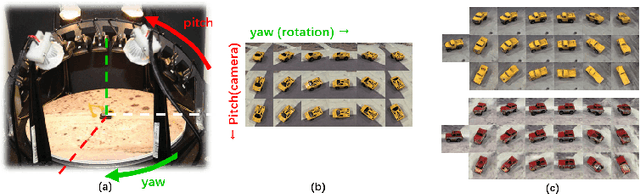
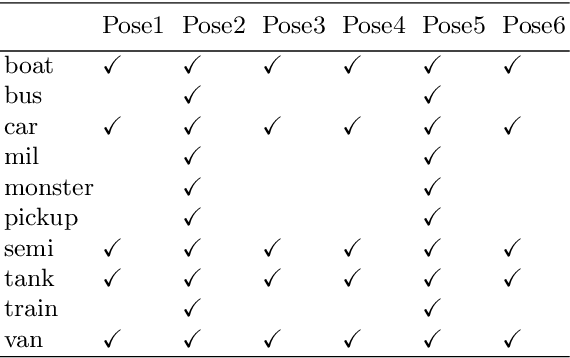
Object pose increases interclass object variance which makes object recognition from 2D images harder. To render a classifier robust to pose variations, most deep neural networks try to eliminate the influence of pose by using large datasets with many poses for each class. Here, we propose a different approach: a class-agnostic object pose transformation network (OPT-Net) can transform an image along 3D yaw and pitch axes to synthesize additional poses continuously. Synthesized images lead to better training of an object classifier. We design a novel eliminate-add structure to explicitly disentangle pose from object identity: first eliminate pose information of the input image and then add target pose information (regularized as continuous variables) to synthesize any target pose. We trained OPT-Net on images of toy vehicles shot on a turntable from the iLab-20M dataset. After training on unbalanced discrete poses (5 classes with 6 poses per object instance, plus 5 classes with only 2 poses), we show that OPT-Net can synthesize balanced continuous new poses along yaw and pitch axes with high quality. Training a ResNet-18 classifier with original plus synthesized poses improves mAP accuracy by 9% overtraining on original poses only. Further, the pre-trained OPT-Net can generalize to new object classes, which we demonstrate on both iLab-20M and RGB-D. We also show that the learned features can generalize to ImageNet.