 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePOMDPs under Probabilistic Semantics
Paper and Code
Aug 22, 2013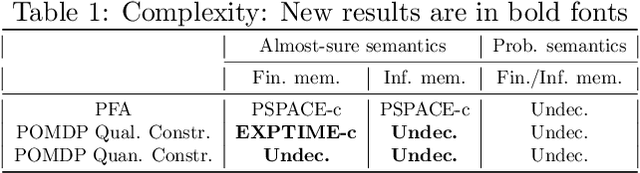
We consider partially observable Markov decision processes (POMDPs) with limit-average payoff, where a reward value in the interval [0,1] is associated to every transition, and the payoff of an infinite path is the long-run average of the rewards. We consider two types of path constraints: (i) quantitative constraint defines the set of paths where the payoff is at least a given threshold {\lambda} in (0, 1]; and (ii) qualitative constraint which is a special case of quantitative constraint with {\lambda} = 1. We consider the computation of the almost-sure winning set, where the controller needs to ensure that the path constraint is satisfied with probability 1. Our main results for qualitative path constraint are as follows: (i) the problem of deciding the existence of a finite-memory controller is EXPTIME-complete; and (ii) the problem of deciding the existence of an infinite-memory controller is undecidable. For quantitative path constraint we show that the problem of deciding the existence of a finite-memory controller is undecidable.