 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePolicy Gradient With Serial Markov Chain Reasoning
Paper and Code
Oct 13, 2022
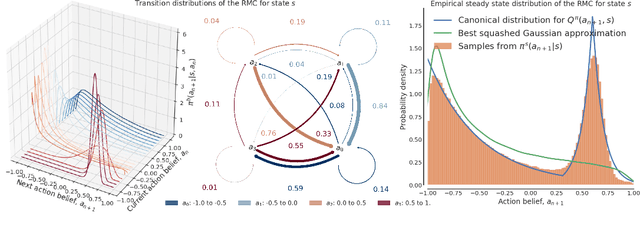
We introduce a new framework that performs decision-making in reinforcement learning (RL) as an iterative reasoning process. We model agent behavior as the steady-state distribution of a parameterized reasoning Markov chain (RMC), optimized with a new tractable estimate of the policy gradient. We perform action selection by simulating the RMC for enough reasoning steps to approach its steady-state distribution. We show our framework has several useful properties that are inherently missing from traditional RL. For instance, it allows agent behavior to approximate any continuous distribution over actions by parameterizing the RMC with a simple Gaussian transition function. Moreover, the number of reasoning steps to reach convergence can scale adaptively with the difficulty of each action selection decision and can be accelerated by re-using past solutions. Our resulting algorithm achieves state-of-the-art performance in popular Mujoco and DeepMind Control benchmarks, both for proprioceptive and pixel-based tasks.