 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePointTree: Transformation-Robust Point Cloud Encoder with Relaxed K-D Trees
Paper and Code
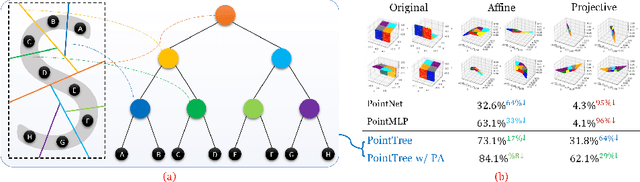

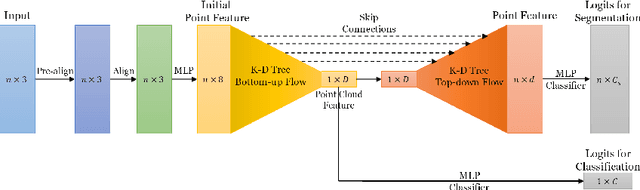

Being able to learn an effective semantic representation directly on raw point clouds has become a central topic in 3D understanding. Despite rapid progress, state-of-the-art encoders are restrictive to canonicalized point clouds, and have weaker than necessary performance when encountering geometric transformation distortions. To overcome this challenge, we propose PointTree, a general-purpose point cloud encoder that is robust to transformations based on relaxed K-D trees. Key to our approach is the design of the division rule in K-D trees by using principal component analysis (PCA). We use the structure of the relaxed K-D tree as our computational graph, and model the features as border descriptors which are merged with pointwise-maximum operation. In addition to this novel architecture design, we further improve the robustness by introducing pre-alignment -- a simple yet effective PCA-based normalization scheme. Our PointTree encoder combined with pre-alignment consistently outperforms state-of-the-art methods by large margins, for applications from object classification to semantic segmentation on various transformed versions of the widely-benchmarked datasets. Code and pre-trained models are available at https://github.com/immortalCO/PointTree.