 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePointPillars Backbone Type Selection For Fast and Accurate LiDAR Object Detection
Paper and Code
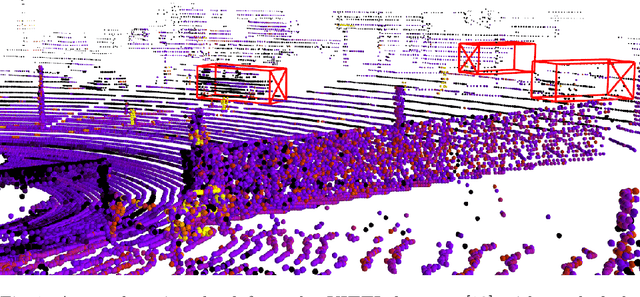
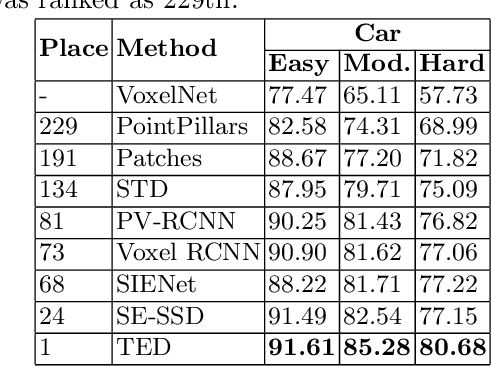
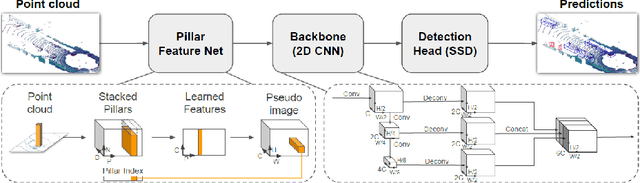
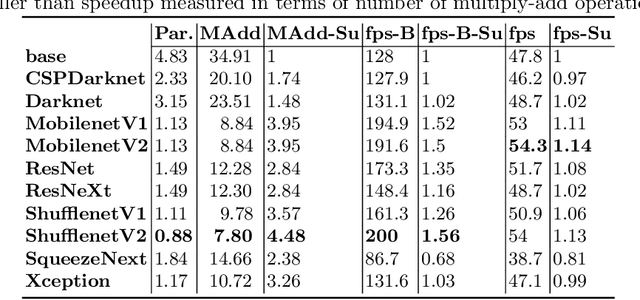
3D object detection from LiDAR sensor data is an important topic in the context of autonomous cars and drones. In this paper, we present the results of experiments on the impact of backbone selection of a deep convolutional neural network on detection accuracy and computation speed. We chose the PointPillars network, which is characterised by a simple architecture, high speed, and modularity that allows for easy expansion. During the experiments, we paid particular attention to the change in detection efficiency (measured by the mAP metric) and the total number of multiply-addition operations needed to process one point cloud. We tested 10 different convolutional neural network architectures that are widely used in image-based detection problems. For a backbone like MobilenetV1, we obtained an almost 4x speedup at the cost of a 1.13% decrease in mAP. On the other hand, for CSPDarknet we got an acceleration of more than 1.5x at an increase in mAP of 0.33%. We have thus demonstrated that it is possible to significantly speed up a 3D object detector in LiDAR point clouds with a small decrease in detection efficiency. This result can be used when PointPillars or similar algorithms are implemented in embedded systems, including SoC FPGAs. The code is available at https://github.com/vision-agh/pointpillars\_backbone.