 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePoint-Voxel Adaptive Feature Abstraction for Robust Point Cloud Classification
Paper and Code
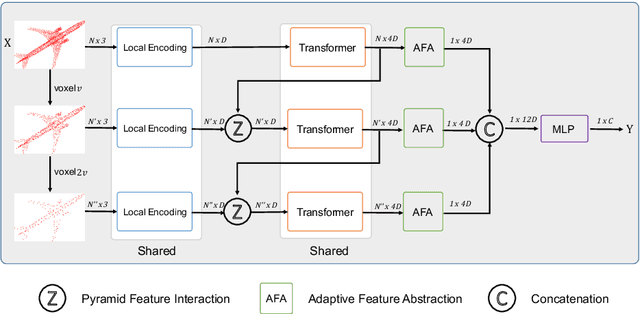
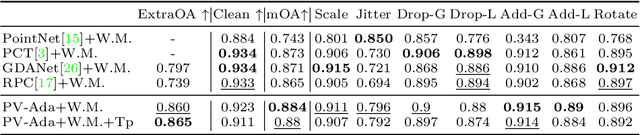
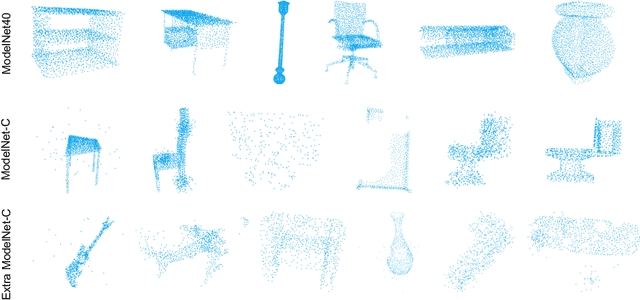
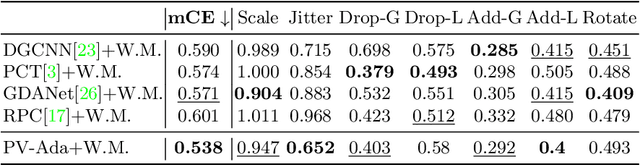
Great progress has been made in point cloud classification with learning-based methods. However, complex scene and sensor inaccuracy in real-world application make point cloud data suffer from corruptions, such as occlusion, noise and outliers. In this work, we propose Point-Voxel based Adaptive (PV-Ada) feature abstraction for robust point cloud classification under various corruptions. Specifically, the proposed framework iteratively voxelize the point cloud and extract point-voxel feature with shared local encoding and Transformer. Then, adaptive max-pooling is proposed to robustly aggregate the point cloud feature for classification. Experiments on ModelNet-C dataset demonstrate that PV-Ada outperforms the state-of-the-art methods. In particular, we rank the $2^{nd}$ place in ModelNet-C classification track of PointCloud-C Challenge 2022, with Overall Accuracy (OA) being 0.865. Code will be available at https://github.com/zhulf0804/PV-Ada.