 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePoint Cloud Completion by Learning Shape Priors
Paper and Code
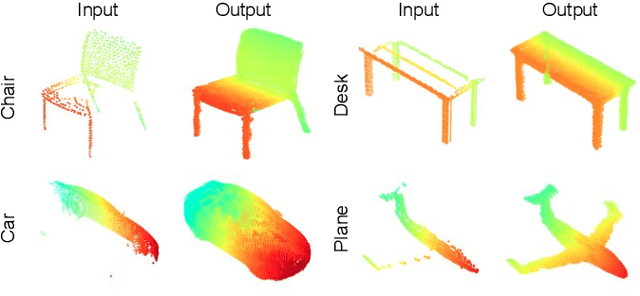
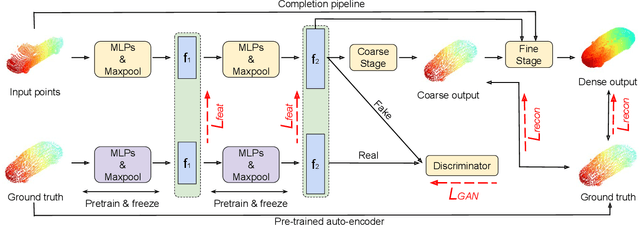
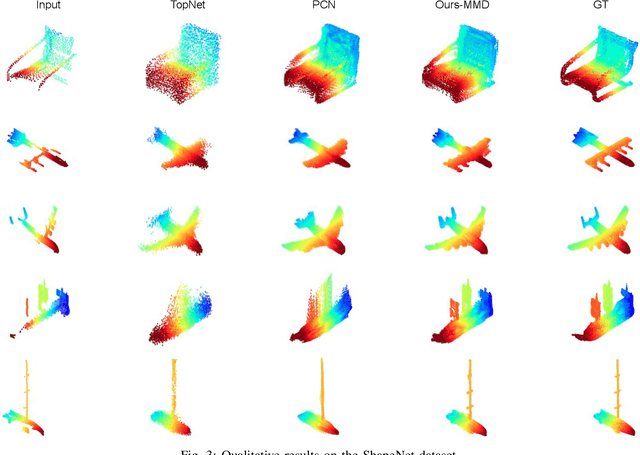
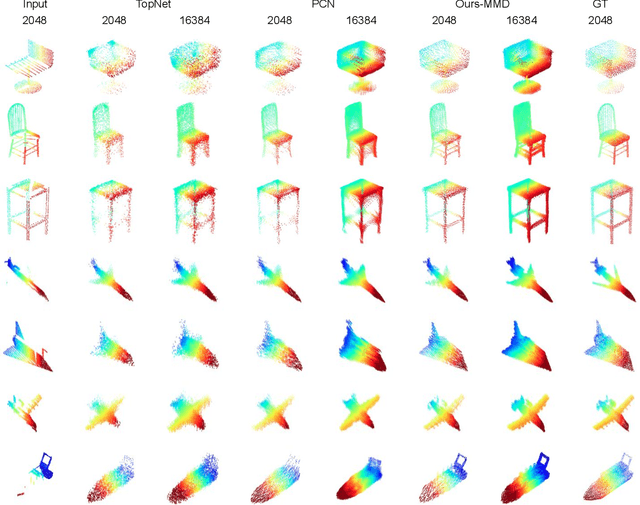
In view of the difficulty in reconstructing object details in point cloud completion, we propose a shape prior learning method for object completion. The shape priors include geometric information in both complete and the partial point clouds. We design a feature alignment strategy to learn the shape prior from complete points, and a coarse to fine strategy to incorporate partial prior in the fine stage. To learn the complete objects prior, we first train a point cloud auto-encoder to extract the latent embeddings from complete points. Then we learn a mapping to transfer the point features from partial points to that of the complete points by optimizing feature alignment losses. The feature alignment losses consist of a L2 distance and an adversarial loss obtained by Maximum Mean Discrepancy Generative Adversarial Network (MMD-GAN). The L2 distance optimizes the partial features towards the complete ones in the feature space, and MMD-GAN decreases the statistical distance of two point features in a Reproducing Kernel Hilbert Space. We achieve state-of-the-art performances on the point cloud completion task. Our code is available at https://github.com/xiaogangw/point-cloud-completion-shape-prior.