Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePoint Cloud based Hierarchical Deep Odometry Estimation
Paper and Code
Mar 05, 2021
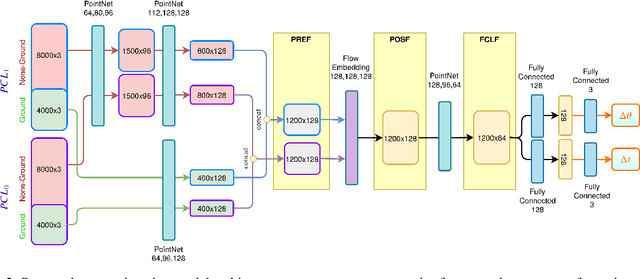
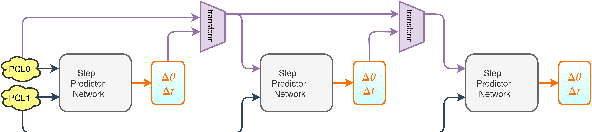
Processing point clouds using deep neural networks is still a challenging task. Most existing models focus on object detection and registration with deep neural networks using point clouds. In this paper, we propose a deep model that learns to estimate odometry in driving scenarios using point cloud data. The proposed model consumes raw point clouds in order to extract frame-to-frame odometry estimation through a hierarchical model architecture. Also, a local bundle adjustment variation of this model using LSTM layers is implemented. These two approaches are comprehensively evaluated and are compared against the state-of-the-art.
View paper on