 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePODNet: A Neural Network for Discovery of Plannable Options
Paper and Code
Nov 15, 2019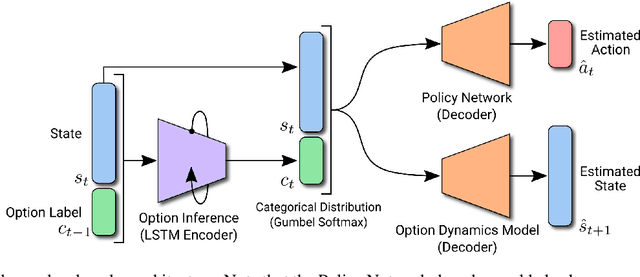
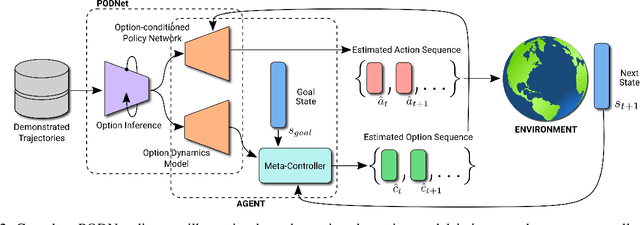
Learning from demonstration has been widely studied in machine learning but becomes challenging when the demonstrated trajectories are unstructured and follow different objectives. This short-paper proposes PODNet, Plannable Option Discovery Network, addressing how to segment an unstructured set of demonstrated trajectories for option discovery. This enables learning from demonstration to perform multiple tasks and plan high-level trajectories based on the discovered option labels. PODNet combines a custom categorical variational autoencoder, a recurrent option inference network, option-conditioned policy network, and option dynamics model in an end-to-end learning architecture. Due to the concurrently trained option-conditioned policy network and option dynamics model, the proposed architecture has implications in multi-task and hierarchical learning, explainable and interpretable artificial intelligence, and applications where the agent is required to learn only from observations.