 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePlanning Visual-Tactile Precision Grasps via Complementary Use of Vision and Touch
Paper and Code
Dec 16, 2022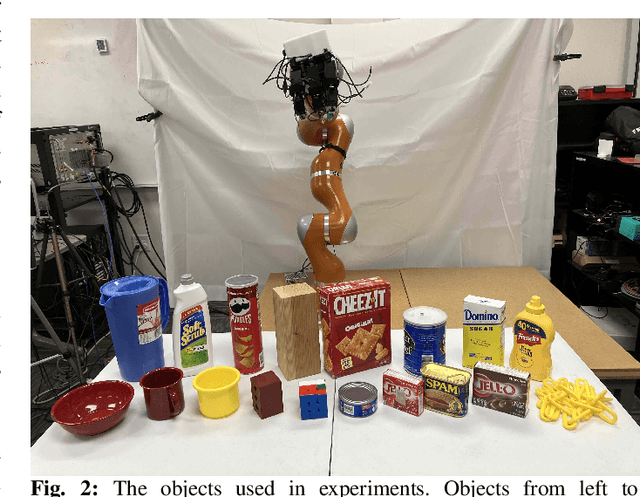
Reliably planning fingertip grasps for multi-fingered hands lies as a key challenge for many tasks including tool use, insertion, and dexterous in-hand manipulation. This task becomes even more difficult when the robot lacks an accurate model of the object to be grasped. Tactile sensing offers a promising approach to account for uncertainties in object shape. However, current robotic hands tend to lack full tactile coverage. As such, a problem arises of how to plan and execute grasps for multi-fingered hands such that contact is made with the area covered by the tactile sensors. To address this issue, we propose an approach to grasp planning that explicitly reasons about where the fingertips should contact the estimated object surface while maximizing the probability of grasp success. Key to our method's success is the use of visual surface estimation for initial planning to encode the contact constraint. The robot then executes this plan using a tactile-feedback controller that enables the robot to adapt to online estimates of the object's surface to correct for errors in the initial plan. Importantly, the robot never explicitly integrates object pose or surface estimates between visual and tactile sensing, instead it uses the two modalities in complementary ways. Vision guides the robots motion prior to contact; touch updates the plan when contact occurs differently than predicted from vision. We show that our method successfully synthesises and executes precision grasps for previously unseen objects using surface estimates from a single camera view. Further, our approach outperforms a state of the art multi-fingered grasp planner, while also beating several baselines we propose.