 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePlanning to Chronicle
Paper and Code
Nov 04, 2020
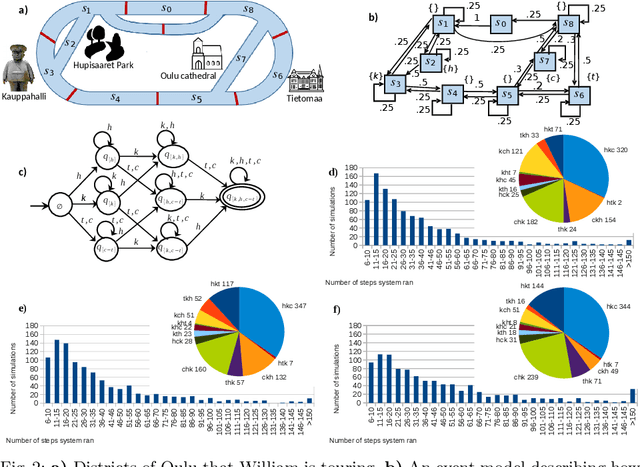
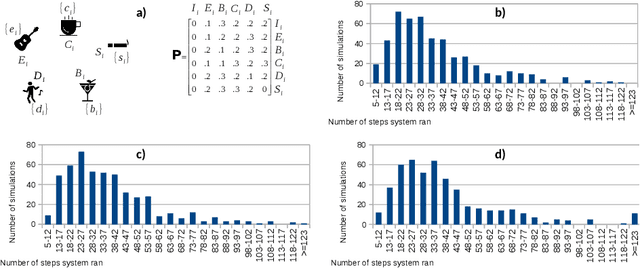
An important class of applications entails a robot monitoring, scrutinizing, or recording the evolution of an uncertain time-extended process. This sort of situation leads an interesting family of planning problems in which the robot is limited in what it sees and must, thus, choose what to pay attention to. The distinguishing characteristic of this setting is that the robot has influence over what it captures via its sensors, but exercises no causal authority over the evolving process. As such, the robot's objective is to observe the underlying process and to produce a `chronicle' of occurrent events, subject to a goal specification of the sorts of event sequences that may be of interest. This paper examines variants of such problems when the robot aims to collect sets of observations to meet a rich specification of their sequential structure. We study this class of problems by modeling a stochastic process via a variant of a hidden Markov model, and specify the event sequences of interest as a regular language, developing a vocabulary of `mutators' that enable sophisticated requirements to be expressed. Under different suppositions about the information gleaned about the Markov model, we formulate and solve different planning problems. The core underlying idea is the construction of a product between the event model and a specification automaton. The paper reports and compares performance metrics by drawing on some small case studies analyzed in depth in simulation.