 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePlanning Multi-Fingered Grasps as Probabilistic Inference in a Learned Deep Network
Paper and Code
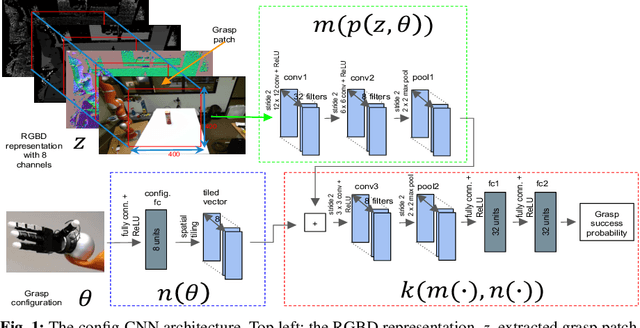
We propose a novel approach to multi-fingered grasp planning leveraging learned deep neural network models. We train a convolutional neural network to predict grasp success as a function of both visual information of an object and grasp configuration. We can then formulate grasp planning as inferring the grasp configuration which maximizes the probability of grasp success. We efficiently perform this inference using a gradient-ascent optimization inside the neural network using the backpropagation algorithm. Our work is the first to directly plan high quality multifingered grasps in configuration space using a deep neural network without the need of an external planner. We validate our inference method performing both multifinger and two-finger grasps on real robots. Our experimental results show that our planning method outperforms existing planning methods for neural networks; while offering several other benefits including being data-efficient in learning and fast enough to be deployed in real robotic applications.