Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePlanning in Dynamic Environments with Conditional Autoregressive Models
Paper and Code
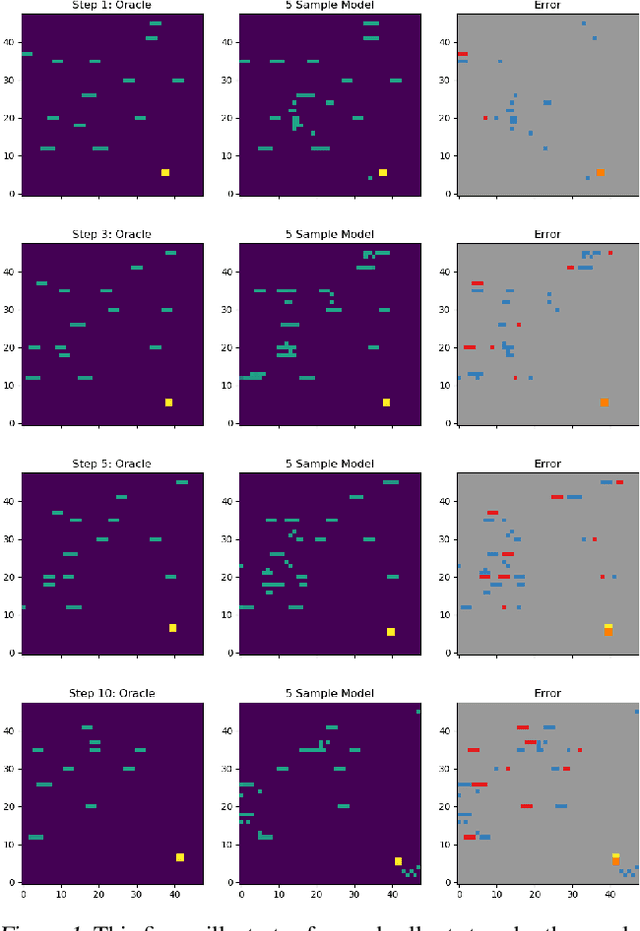
We demonstrate the use of conditional autoregressive generative models (van den Oord et al., 2016a) over a discrete latent space (van den Oord et al., 2017b) for forward planning with MCTS. In order to test this method, we introduce a new environment featuring varying difficulty levels, along with moving goals and obstacles. The combination of high-quality frame generation and classical planning approaches nearly matches true environment performance for our task, demonstrating the usefulness of this method for model-based planning in dynamic environments.
* 6 pages, 1 figure, in Proceedings of the Prediction and Generative
Modeling in Reinforcement Learning Workshop at the International Conference
on Machine Learning (ICML) in 2018
View paper on