 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePlaneSLAM: Plane-based LiDAR SLAM for Motion Planning in Structured 3D Environments
Paper and Code
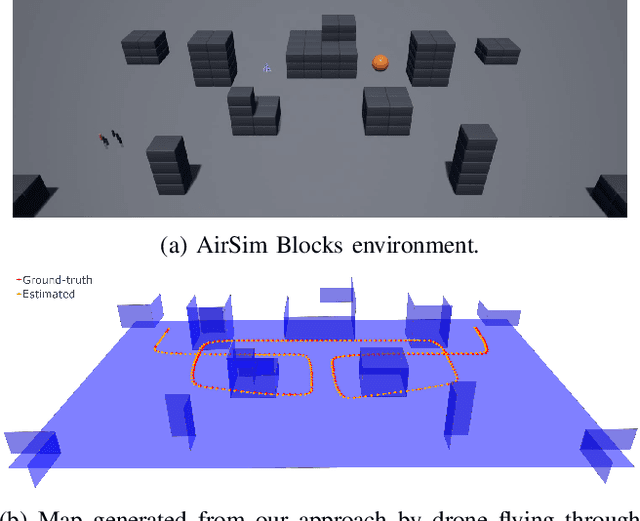
LiDAR sensors are a powerful tool for robot simultaneous localization and mapping (SLAM) in unknown environments, but the raw point clouds they produce are dense, computationally expensive to store, and unsuited for direct use by downstream autonomy tasks, such as motion planning. For integration with motion planning, it is desirable for SLAM pipelines to generate lightweight geometric map representations. Such representations are also particularly well-suited for man-made environments, which can often be viewed as a so-called "Manhattan world" built on a Cartesian grid. In this work we present a 3D LiDAR SLAM algorithm for Manhattan world environments which extracts planar features from point clouds to achieve lightweight, real-time localization and mapping. Our approach generates plane-based maps which occupy significantly less memory than their point cloud equivalents, and are suited towards fast collision checking for motion planning. By leveraging the Manhattan world assumption, we target extraction of orthogonal planes to generate maps which are more structured and organized than those of existing plane-based LiDAR SLAM approaches. We demonstrate our approach in the high-fidelity AirSim simulator and in real-world experiments with a ground rover equipped with a Velodyne LiDAR. For both cases, we are able to generate high quality maps and trajectory estimates at a rate matching the sensor rate of 10 Hz.