 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePL-CVIO: Point-Line Cooperative Visual-Inertial Odometry
Paper and Code
Nov 09, 2023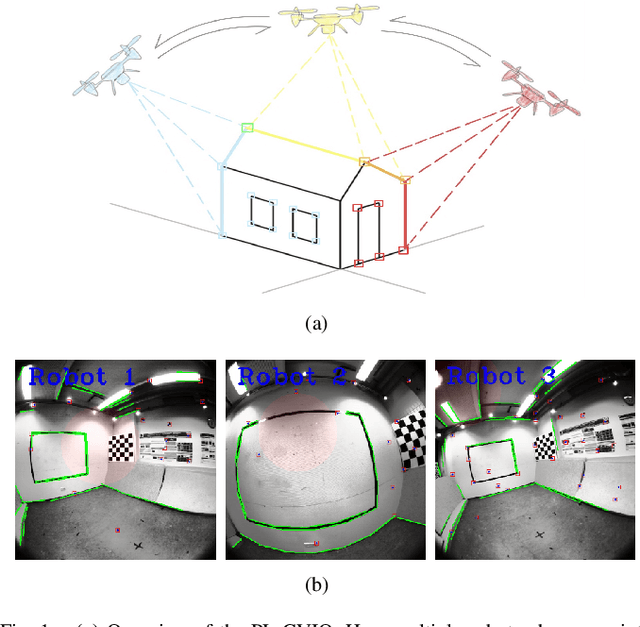
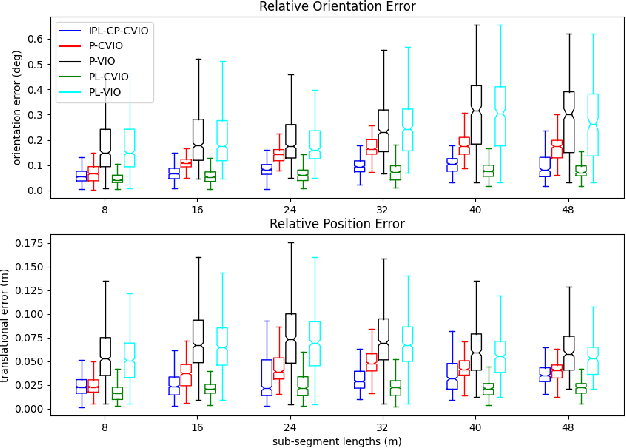
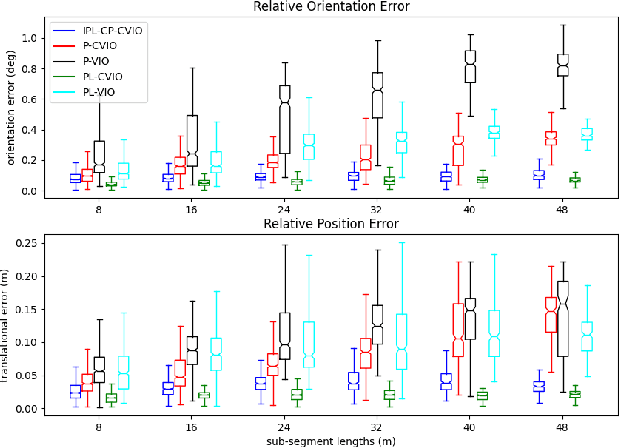
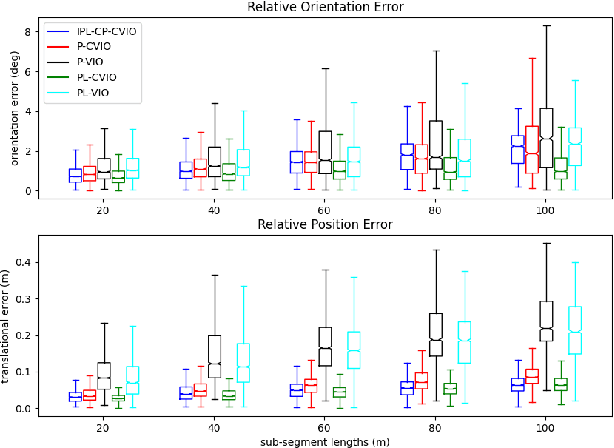
Low-feature environments are one of the main Achilles' heels of geometric computer vision (CV) algorithms. In most human-built scenes often with low features, lines can be considered complements to points. In this paper, we present a multi-robot cooperative visual-inertial navigation system (VINS) using both point and line features. By utilizing the covariance intersection (CI) update within the multi-state constraint Kalman filter (MSCKF) framework, each robot exploits not only its own point and line measurements, but also constraints of common point and common line features observed by its neighbors. The line features are parameterized and updated by utilizing the Closest Point representation. The proposed algorithm is validated extensively in both Monte-Carlo simulations and a real-world dataset. The results show that the point-line cooperative visual-inertial odometry (PL-CVIO) outperforms the independent MSCKF and our previous work CVIO in both low-feature and rich-feature environments.