Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePiecewise Linear De-skewing for LiDAR Inertial Odometry
Paper and Code

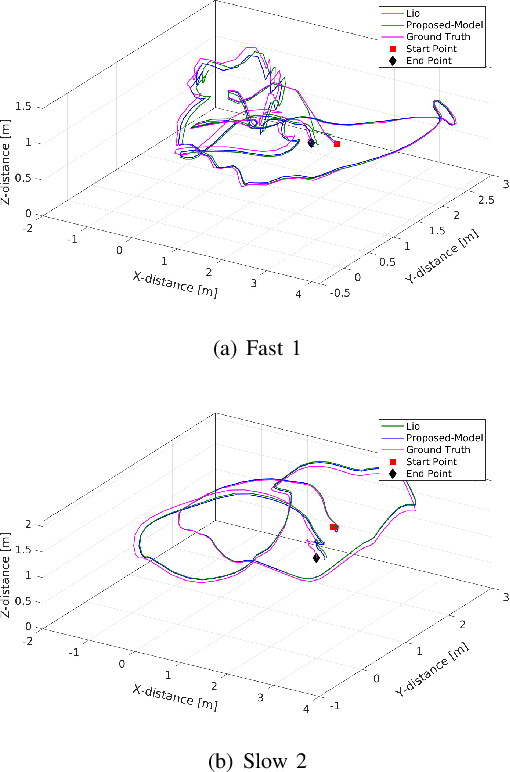

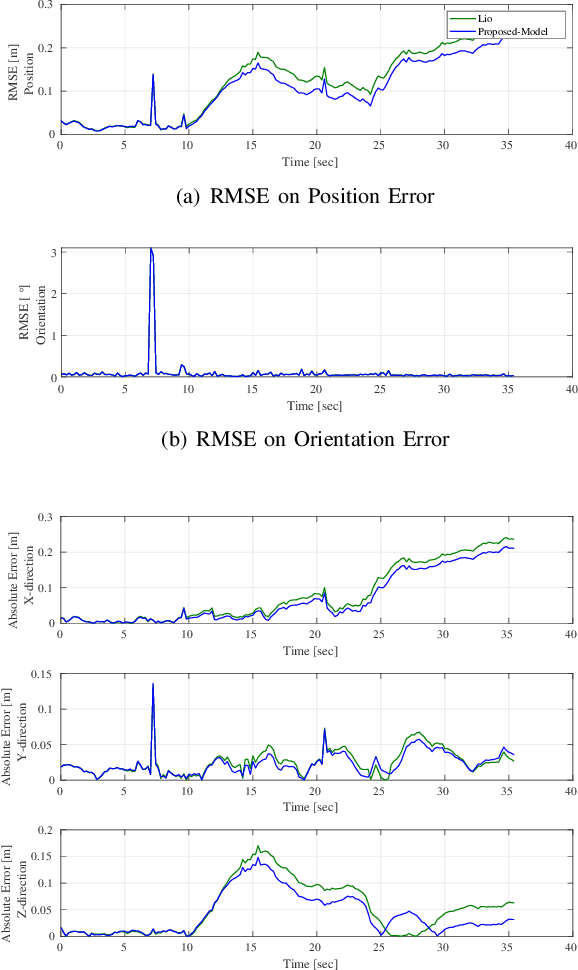
Light detection and ranging (LiDAR) on a moving agent could suffer from motion distortion due to simultaneous rotation of the LiDAR and fast movement of the agent. An accurate piecewise linear de skewing algorithm is proposed to correct the motion distortions for LiDAR inertial odometry (LIO) using high frequency motion information provided by an Inertial Measurement Unit (IMU). Experimental results show that the proposed algorithm can be adopted to improve the performance of existing LIO algorithms especially in cases of fast movement.
* 9 pages, 7 figures, Accepted for publication by IEEE Intelligent
Transportation Systems Conference (ITSC 2021)
View paper on