 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePIDA: Smooth and Stable Flight Using Stochastic Dual Simplex Algorithm and Genetic Filter
Paper and Code
Jun 17, 2020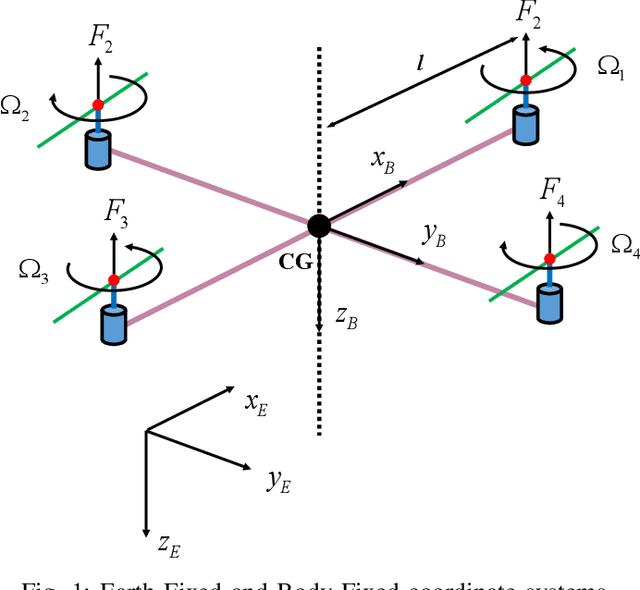
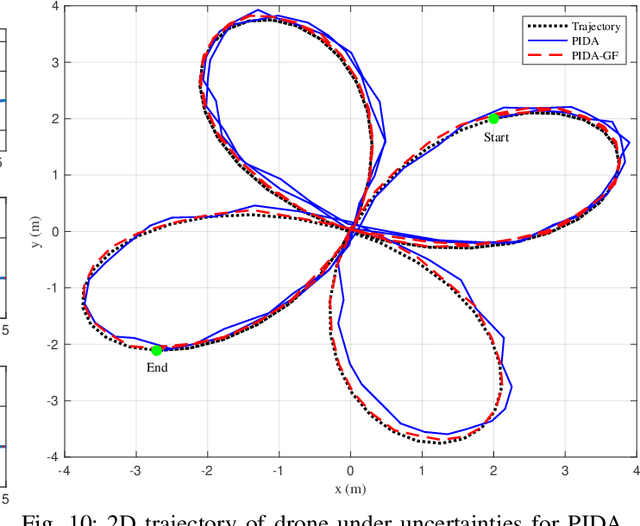
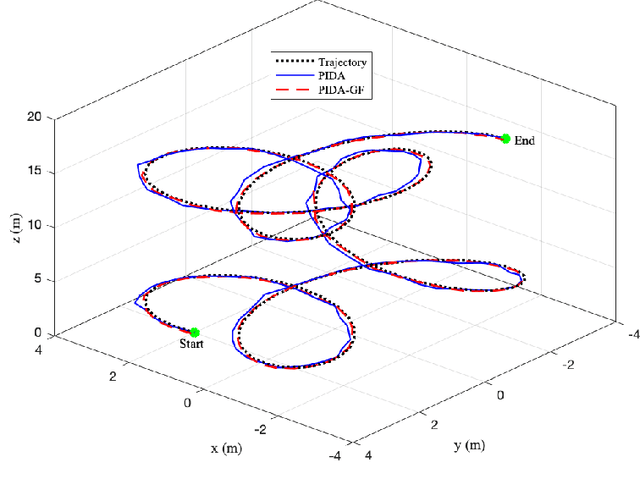

This paper presents a new Proportional-Integral-Derivative-Accelerated (PIDA) control with a derivative filter to improve quadcopter flight stability in a noisy environment. The mathematical model is derived from having an accurate model with a high level of fidelity by addressing the problems of non-linearity, uncertainties, and coupling. These uncertainties and measurement noises cause instability in flight and automatic hovering. The proposed controller associated with a heuristic Genetic Filter (GF) addresses these challenges. The tuning of the proposed PIDA controller associated with the objective of controlling is performed by Stochastic Dual Simplex Algorithm (SDSA). GF is applied to the PIDA control to estimate the observed states and parameters of quadcopters in both attitude and altitude. The simulation results show that the proposed control associated with GF has a strong ability to track the desired point in the presence of disturbances.