 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePhysics-based Differentiable Depth Sensor Simulation
Paper and Code
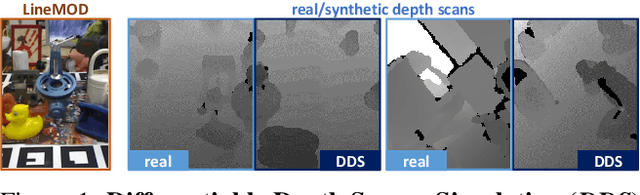
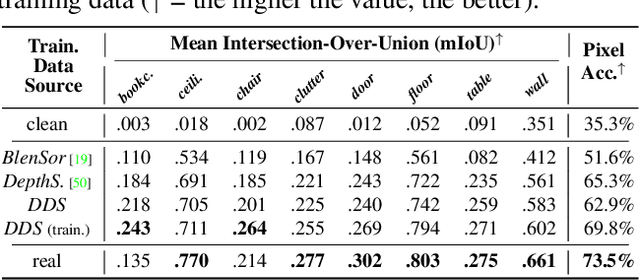
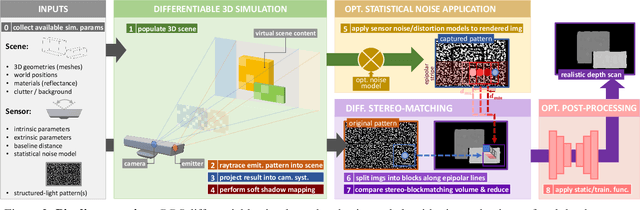
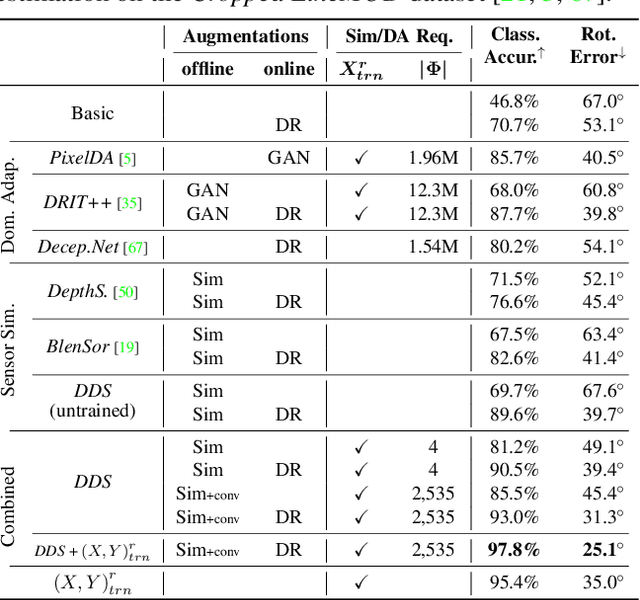
Gradient-based algorithms are crucial to modern computer-vision and graphics applications, enabling learning-based optimization and inverse problems. For example, photorealistic differentiable rendering pipelines for color images have been proven highly valuable to applications aiming to map 2D and 3D domains. However, to the best of our knowledge, no effort has been made so far towards extending these gradient-based methods to the generation of depth (2.5D) images, as simulating structured-light depth sensors implies solving complex light transport and stereo-matching problems. In this paper, we introduce a novel end-to-end differentiable simulation pipeline for the generation of realistic 2.5D scans, built on physics-based 3D rendering and custom block-matching algorithms. Each module can be differentiated w.r.t sensor and scene parameters; e.g., to automatically tune the simulation for new devices over some provided scans or to leverage the pipeline as a 3D-to-2.5D transformer within larger computer-vision applications. Applied to the training of deep-learning methods for various depth-based recognition tasks (classification, pose estimation, semantic segmentation), our simulation greatly improves the performance of the resulting models on real scans, thereby demonstrating the fidelity and value of its synthetic depth data compared to previous static simulations and learning-based domain adaptation schemes.