 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePhysical LiDAR Simulation in Real-Time Engine
Paper and Code
Aug 23, 2022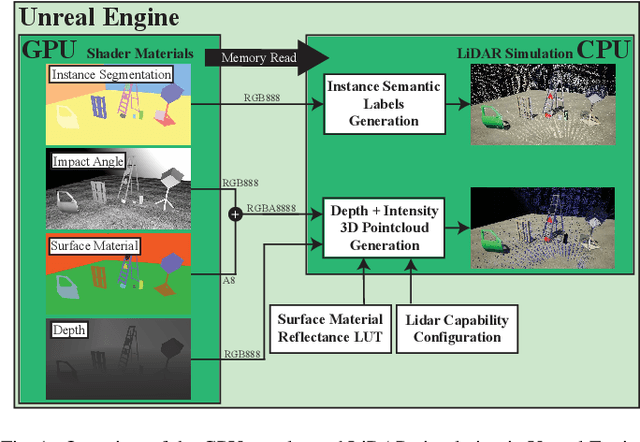
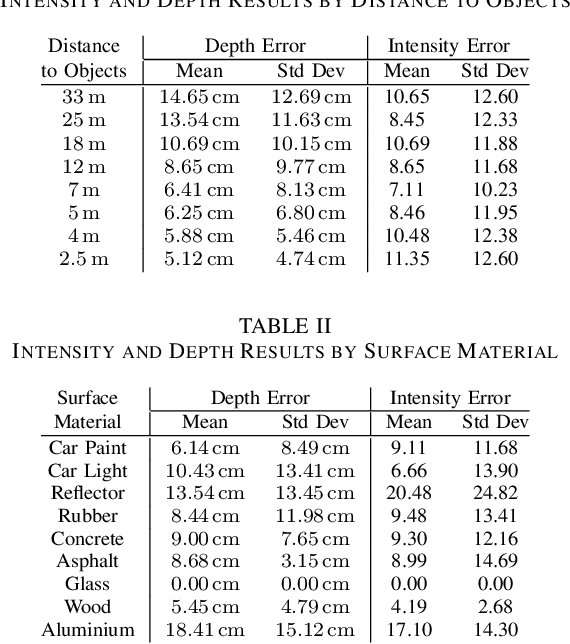
Designing and validating sensor applications and algorithms in simulation is an important step in the modern development process. Furthermore, modern open-source multi-sensor simulation frameworks are moving towards the usage of video-game engines such as the Unreal Engine. Simulation of a sensor such as a LiDAR can prove to be difficult in such real-time software. In this paper we present a GPU-accelerated simulation of LiDAR based on its physical properties and interaction with the environment. We provide a generation of the depth and intensity data based on the properties of the sensor as well as the surface material and incidence angle at which the light beams hit the surface. It is validated against a real LiDAR sensor and shown to be accurate and precise although highly depended on the spectral data used for the material properties.