 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePHI-MVS: Plane Hypothesis Inference Multi-view Stereo for Large-Scale Scene Reconstruction
Paper and Code
Apr 13, 2021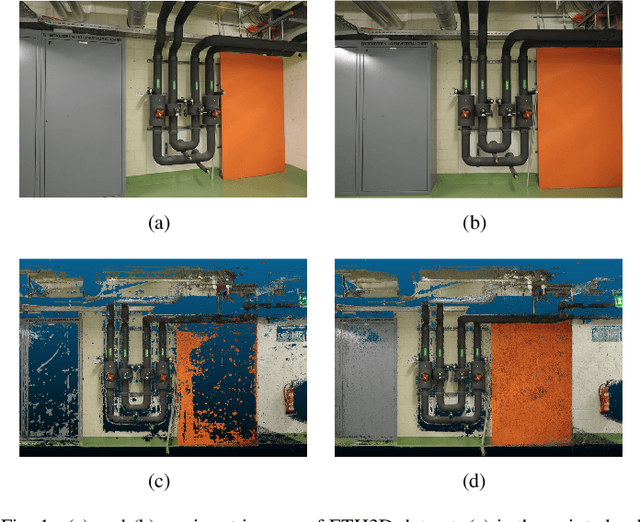
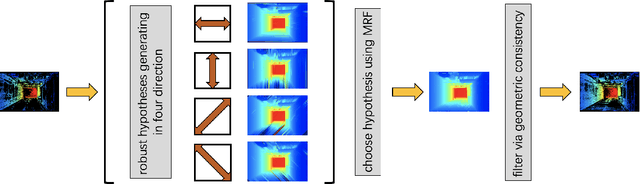
PatchMatch based Multi-view Stereo (MVS) algorithms have achieved great success in large-scale scene reconstruction tasks. However, reconstruction of texture-less planes often fails as similarity measurement methods may become ineffective on these regions. Thus, a new plane hypothesis inference strategy is proposed to handle the above issue. The procedure consists of two steps: First, multiple plane hypotheses are generated using filtered initial depth maps on regions that are not successfully recovered; Second, depth hypotheses are selected using Markov Random Field (MRF). The strategy can significantly improve the completeness of reconstruction results with only acceptable computing time increasing. Besides, a new acceleration scheme similar to dilated convolution can speed up the depth map estimating process with only a slight influence on the reconstruction. We integrated the above ideas into a new MVS pipeline, Plane Hypothesis Inference Multi-view Stereo (PHI-MVS). The result of PHI-MVS is validated on ETH3D public benchmarks, and it demonstrates competing performance against the state-of-the-art.