 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePedestrian Collision Avoidance System for Scenarios with Occlusions
Paper and Code
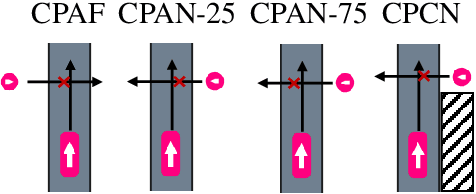
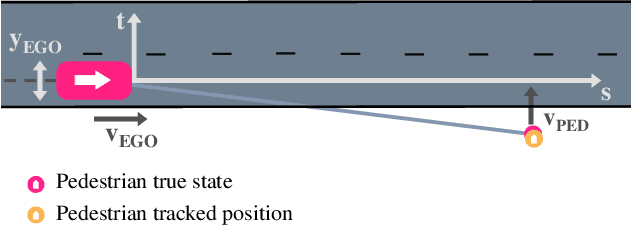
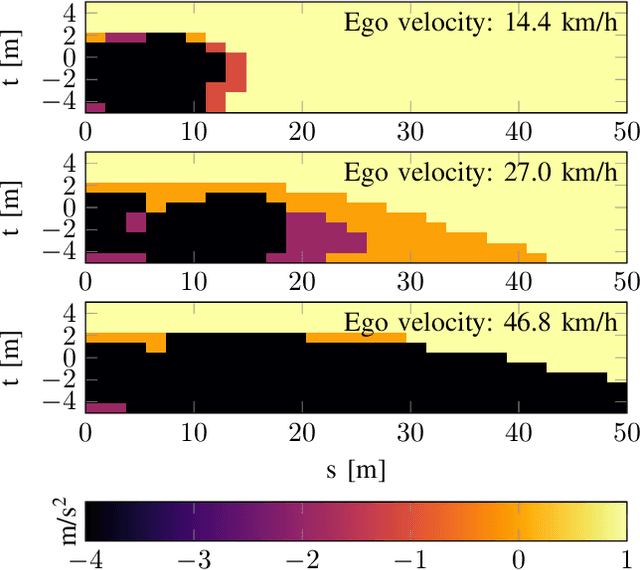
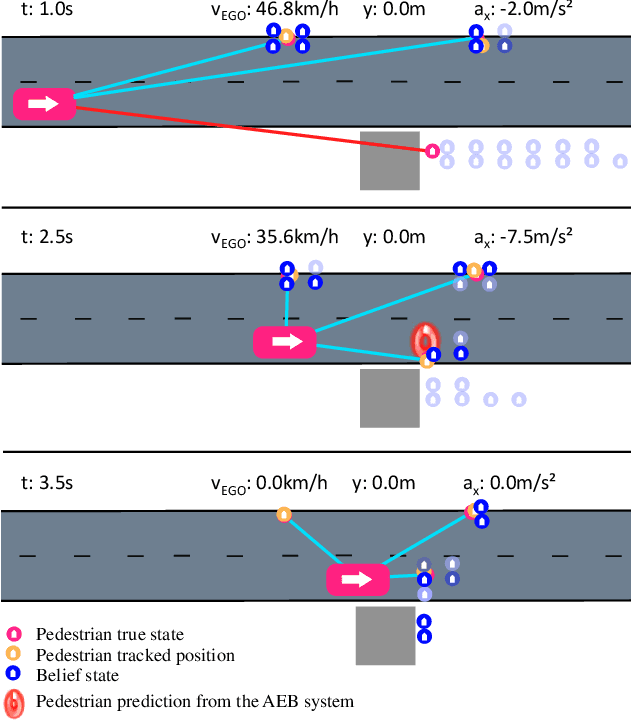
Safe autonomous driving in urban areas requires robust algorithms to avoid collisions with other traffic participants with limited perception ability. Current deployed approaches relying on Autonomous Emergency Braking (AEB) systems are often overly conservative. In this work, we formulate the problem as a partially observable Markov decision process (POMDP), to derive a policy robust to uncertainty in the pedestrian location. We investigate how to integrate such a policy with an AEB system that operates only when a collision is unavoidable. In addition, we propose a rigorous evaluation methodology on a set of well defined scenarios. We show that combining the two approaches provides a robust autonomous braking system that reduces unnecessary braking caused by using the AEB system on its own.