 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePDE-Based Optimization for Stochastic Mapping and Coverage Strategies using Robotic Ensembles
Paper and Code
Nov 29, 2017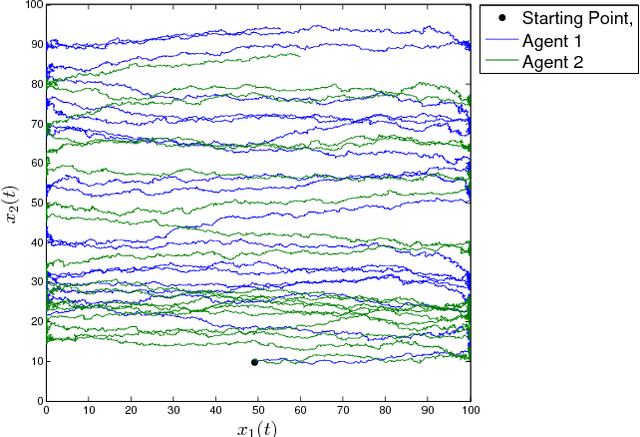

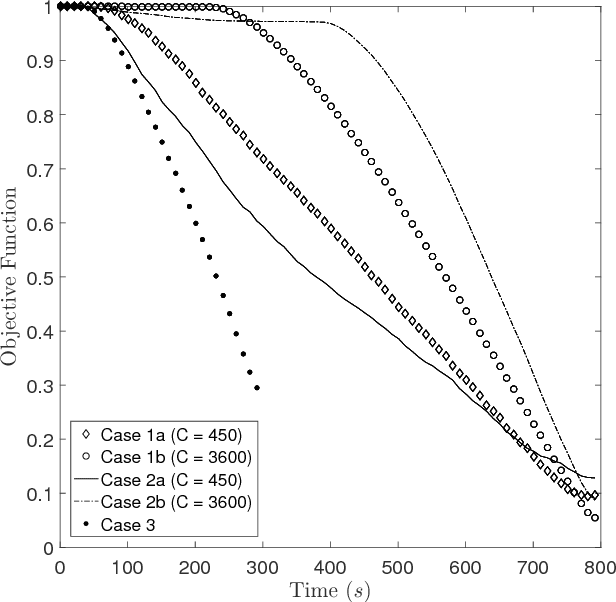

This paper presents a novel partial differential equation (PDE)-based framework for controlling an ensemble of robots, which have limited sensing and actuation capabilities and exhibit stochastic behaviors, to perform mapping and coverage tasks. We model the ensemble population dynamics as an advection-diffusion-reaction PDE model and formulate the mapping and coverage tasks as identification and control problems for this model. In the mapping task, robots are deployed over a closed domain to gather data, which is unlocalized and independent of robot identities, for reconstructing the unknown spatial distribution of a region of interest. We frame this task as a convex optimization problem whose solution represents the region as a spatially-dependent coefficient in the PDE model. We then consider a coverage problem in which the robots must perform a desired activity at a programmable probability rate to achieve a target spatial distribution of activity over the reconstructed region of interest. We formulate this task as an optimal control problem in which the PDE model is expressed as a bilinear control system, with the robots' coverage activity rate and velocity field defined as the control inputs. We validate our approach with simulations of a combined mapping and coverage scenario in two environments with three target coverage distributions.