 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePath Tracking using Echoes in an Unknown Environment: the Issue of Symmetries and How to Break Them
Paper and Code
Mar 01, 2024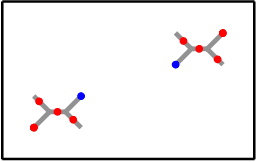
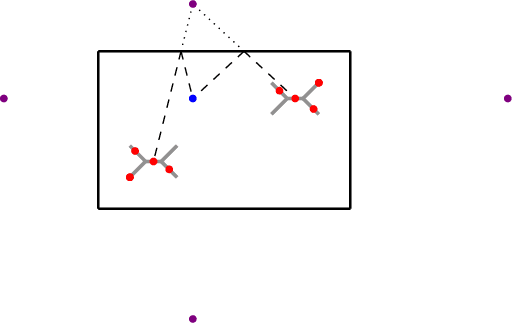
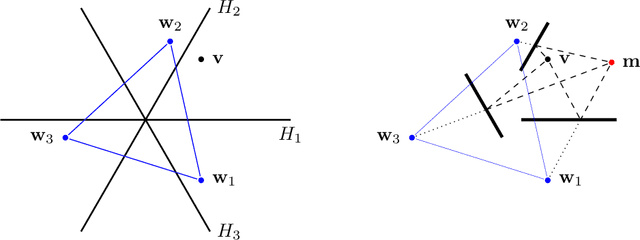
This paper deals with the problem of reconstructing the path of a vehicle in an unknown environment consisting of planar structures using sound. Many systems in the literature do this by using a loudspeaker and microphones mounted on a vehicle. Symmetries in the environment lead to solution ambiguities for such systems. We propose to resolve this issue by placing the loudspeaker at a fixed location in the environment rather than on the vehicle. The question of whether this will remove ambiguities regardless of the environment geometry leads to a question about breaking symmetries that can be phrased in purely mathematical terms. We solve this question in the affirmative if the geometry is in dimension three or bigger, and give counterexamples in dimension two. Excluding the rare situations where the counterexamples arise, we also give an affirmative answer in dimension two. Our results lead to a simple path reconstruction algorithm for a vehicle carrying four microphones navigating within an environment in which a loudspeaker at a fixed position emits short bursts of sounds. This algorithm could be combined with other methods from the literature to construct a path tracking system for vehicles navigating within a potentially symmetric environment.