 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePath Planning for the Dynamic UAV-Aided Wireless Systems using Monte Carlo Tree Search
Paper and Code
Jan 13, 2022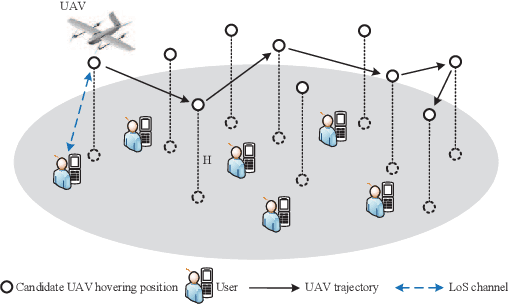
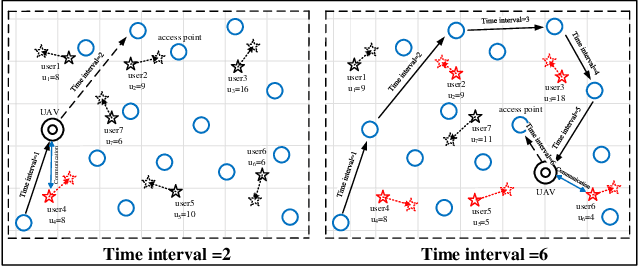
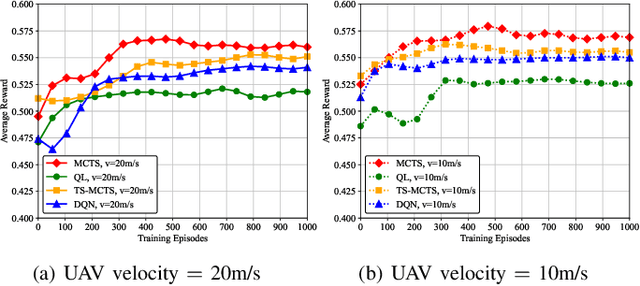
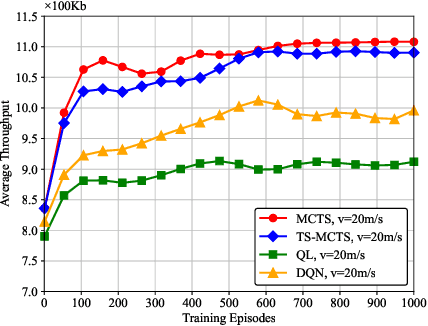
For UAV-aided wireless systems, online path planning attracts much attention recently. To better adapt to the real-time dynamic environment, we, for the first time, propose a Monte Carlo Tree Search (MCTS)-based path planning scheme. In details, we consider a single UAV acts as a mobile server to provide computation tasks offloading services for a set of mobile users on the ground, where the movement of ground users follows a Random Way Point model. Our model aims at maximizing the average throughput under energy consumption and user fairness constraints, and the proposed timesaving MCTS algorithm can further improve the performance. Simulation results show that the proposed algorithm achieves a larger average throughput and a faster convergence performance compared with the baseline algorithms of Q-learning and Deep Q-Network.