 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePath-Aware Graph Attention for HD Maps in Motion Prediction
Paper and Code
Feb 23, 2022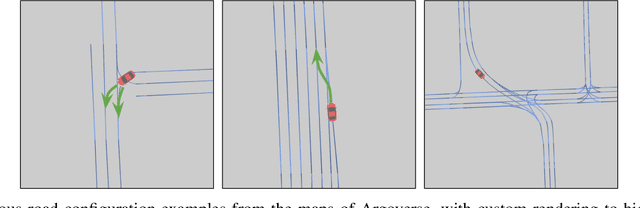
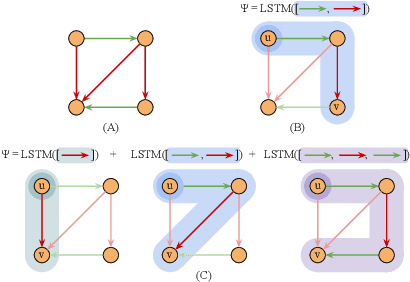
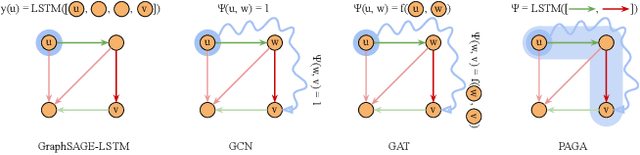
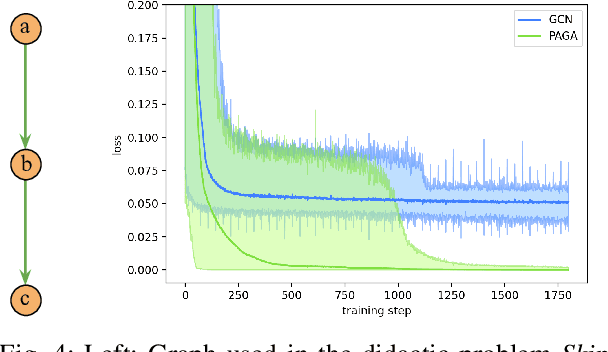
The success of motion prediction for autonomous driving relies on integration of information from the HD maps. As maps are naturally graph-structured, investigation on graph neural networks (GNNs) for encoding HD maps is burgeoning in recent years. However, unlike many other applications where GNNs have been straightforwardly deployed, HD maps are heterogeneous graphs where vertices (lanes) are connected by edges (lane-lane interaction relationships) of various nature, and most graph-based models are not designed to understand the variety of edge types which provide crucial cues for predicting how the agents would travel the lanes. To overcome this challenge, we propose Path-Aware Graph Attention, a novel attention architecture that infers the attention between two vertices by parsing the sequence of edges forming the paths that connect them. Our analysis illustrates how the proposed attention mechanism can facilitate learning in a didactic problem where existing graph networks like GCN struggle. By improving map encoding, the proposed model surpasses previous state of the art on the Argoverse Motion Forecasting dataset, and won the first place in the 2021 Argoverse Motion Forecasting Competition.