Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePassive Compliance Control of Aerial Manipulators
Paper and Code
Aug 09, 2018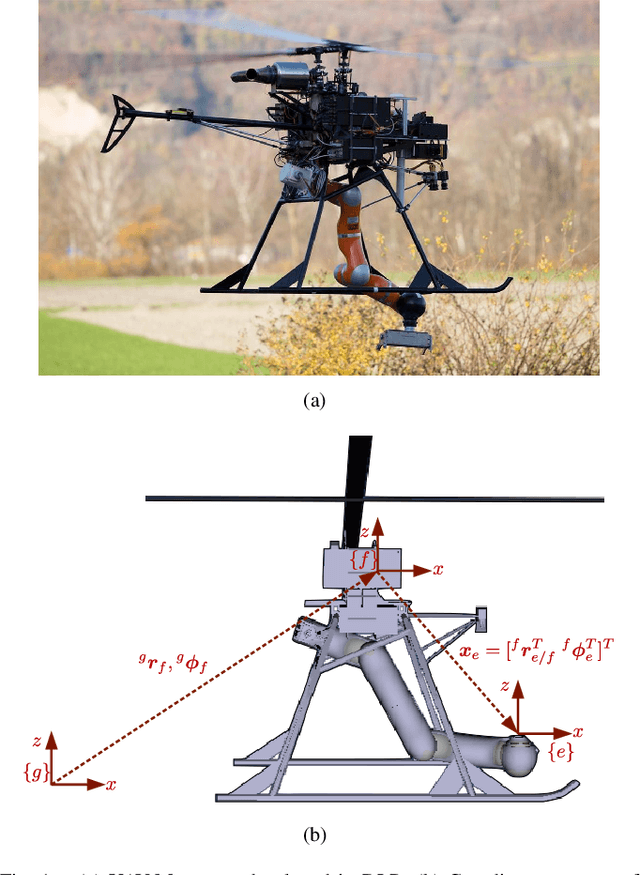
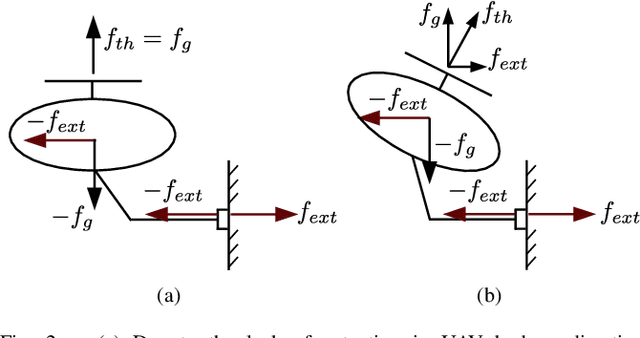
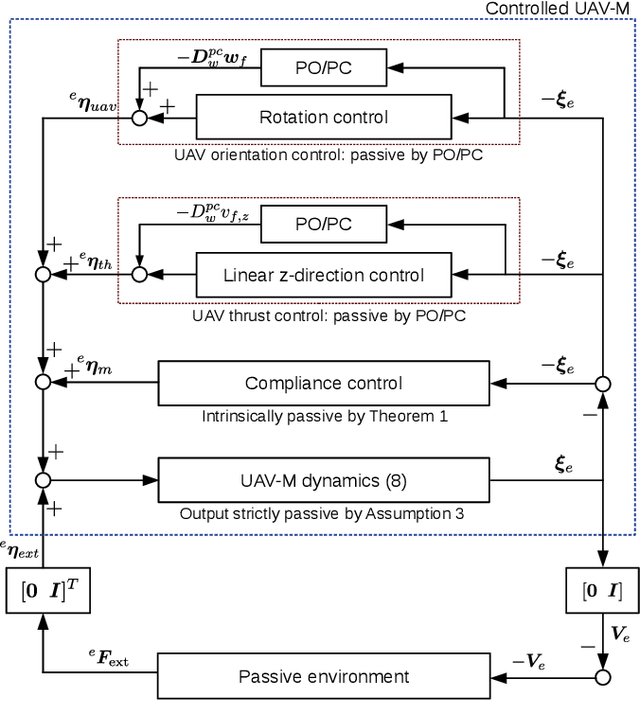

This paper presents a passive compliance control for aerial manipulators to achieve stable environmental interactions. The main challenge is the absence of actuation along body-planar directions of the aerial vehicle which might be required during the interaction to preserve passivity. The controller proposed in this paper guarantees passivity of the manipulator through a proper choice of end-effector coordinates, and that of vehicle fuselage is guaranteed by exploiting time domain passivity technique. Simulation studies validate the proposed approach.
* IEEE/RSJ International Conference on Intelligent Robots and Systems
(IROS) 2018
View paper on