 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeParametric annealing: a stochastic search method for human pose tracking
Paper and Code
May 02, 2012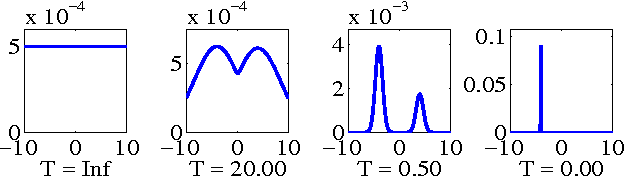

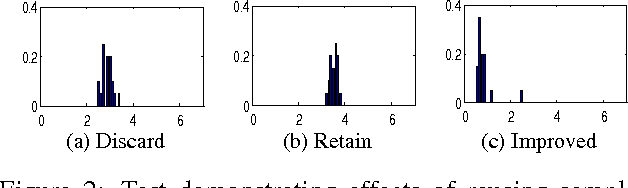
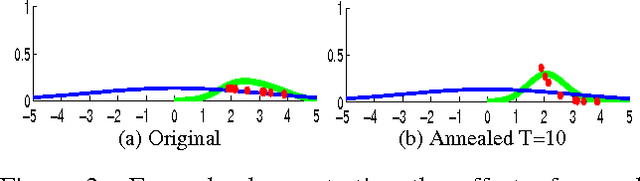
Model based methods to marker-free motion capture have a very high computational overhead that make them unattractive. In this paper we describe a method that improves on existing global optimization techniques to tracking articulated objects. Our method improves on the state-of-the-art Annealed Particle Filter (APF) by reusing samples across annealing layers and by using an adaptive parametric density for diffusion. We compare the proposed method with APF on a scalable problem and study how the two methods scale with the dimensionality, multi-modality and the range of search. Then we perform sensitivity analysis on the parameters of our algorithm and show that it tolerates a wide range of parameter settings. We also show results on tracking human pose from the widely-used Human Eva I dataset. Our results show that the proposed method reduces the tracking error despite using less than 50% of the computational resources as APF. The tracked output also shows a significant qualitative improvement over APF as demonstrated through image and video results.