 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeParallelized Instantaneous Velocity and Heading Estimation of Objects using Single Imaging Radar
Paper and Code
Dec 23, 2020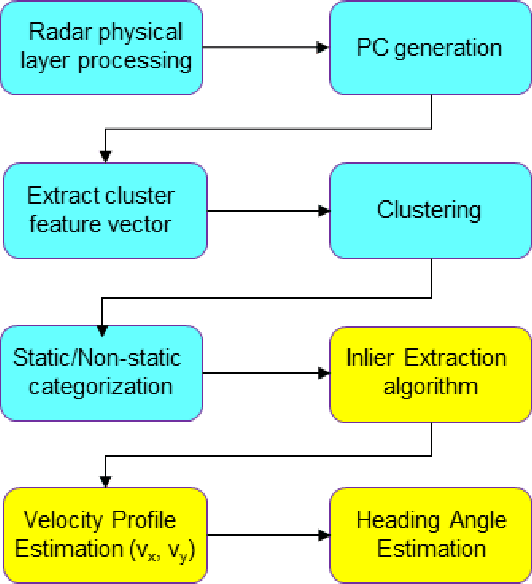
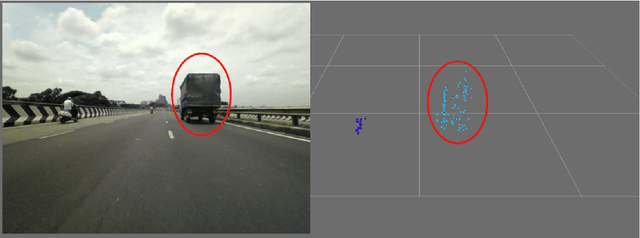
The development of high-resolution imaging radars introduce a plethora of useful applications, particularly in the automotive sector. With increasing attention on active transport safety and autonomous driving, these imaging radars are set to form the core of an autonomous engine. One of the most important tasks of such high-resolution radars is to estimate the instantaneous velocities and heading angles of the detected objects (vehicles, pedestrians, etc.). Feasible estimation methods should be fast enough in real-time scenarios, bias-free and robust against micro-Dopplers, noise and other systemic variations. This work proposes a parallel-computing scheme that achieves a real-time and accurate implementation of vector velocity determination using frequency modulated continuous wave (FMCW) radars. The proposed scheme is tested against traffic data collected using an FMCW radar at a center frequency of 78.6 GHz and a bandwidth of 4 GHz. Experiments show that the parallel algorithm presented performs much faster than its conventional counterparts without any loss in precision.