 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOWLed: Outlier-weighed Layerwise Pruning for Efficient Autonomous Driving Framework
Paper and Code
Nov 12, 2024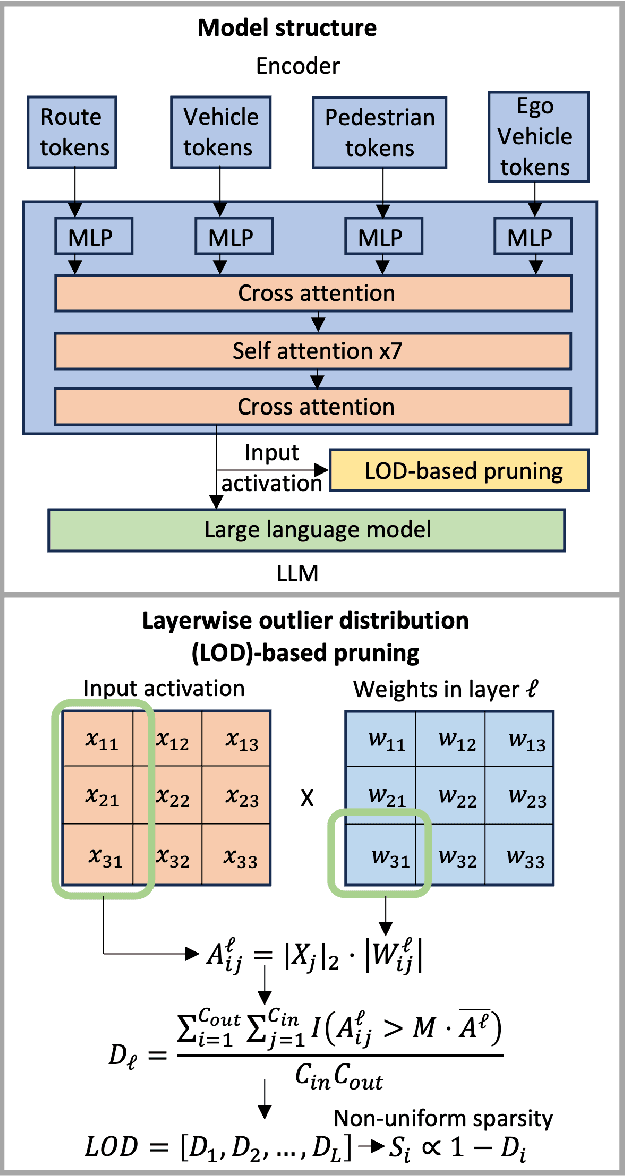
The integration of Large Language Models (LLMs) into autonomous driving systems offers promising enhancements in environmental understanding and decision-making. However, the substantial computational demands of deploying LLMs locally on vehicles render this approach unfeasible for real-world automotive applications. To address this challenge, we introduce OWLed, the Outlier-Weighed Layerwise Pruning for Efficient Autonomous Driving Framework that leverages outlier-weighted layerwise sparsity for model compression. Our method assigns non-uniform sparsity ratios to different layers based on the distribution of outlier features, significantly reducing the model size without the need for fine-tuning. To ensure the compressed model adapts well to autonomous driving tasks, we incorporate driving environment data into both the calibration and pruning processes. Our empirical studies reveal that the encoder component is more sensitive to pruning than the LLM, highlighting its critical role in the system. Experimental results demonstrate that OWLed outperforms existing methods in perception, action prediction, and language understanding while substantially lowering computational requirements. These findings underscore the potential of combining advanced pruning techniques with LLMs to develop efficient and robust autonomous driving systems capable of handling complex scenarios. Code will be made publicly available.