 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOrder-One Rolling Shutter Cameras
Paper and Code
Mar 17, 2024
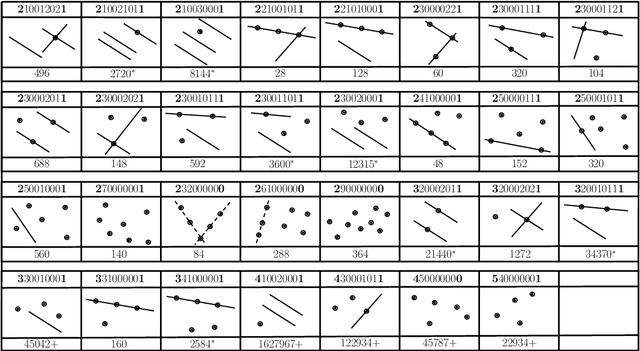

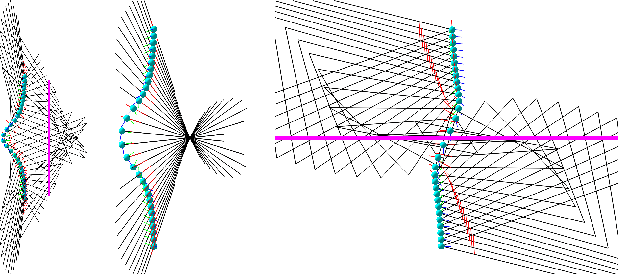
Rolling shutter (RS) cameras dominate consumer and smartphone markets. Several methods for computing the absolute pose of RS cameras have appeared in the last 20 years, but the relative pose problem has not been fully solved yet. We provide a unified theory for the important class of order-one rolling shutter (RS$_1$) cameras. These cameras generalize the perspective projection to RS cameras, projecting a generic space point to exactly one image point via a rational map. We introduce a new back-projection RS camera model, characterize RS$_1$ cameras, construct explicit parameterizations of such cameras, and determine the image of a space line. We classify all minimal problems for solving the relative camera pose problem with linear RS$_1$ cameras and discover new practical cases. Finally, we show how the theory can be used to explain RS models previously used for absolute pose computation.