 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptimizing NeRF-based SLAM with Trajectory Smoothness Constraints
Paper and Code
Oct 11, 2024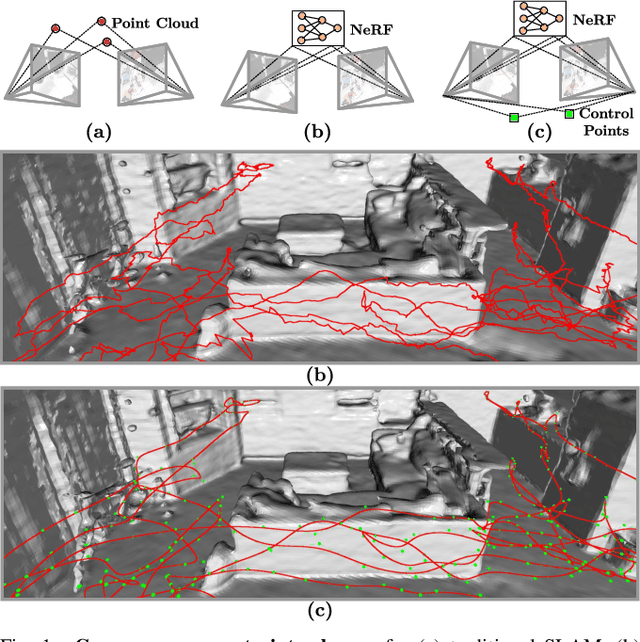
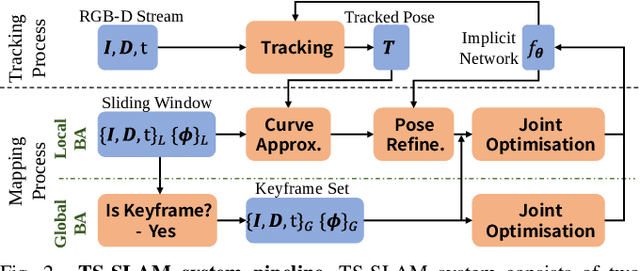
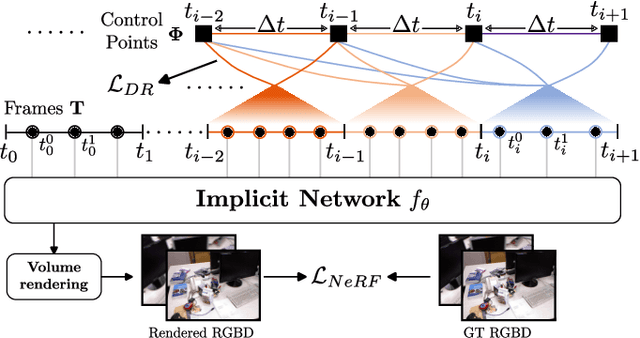
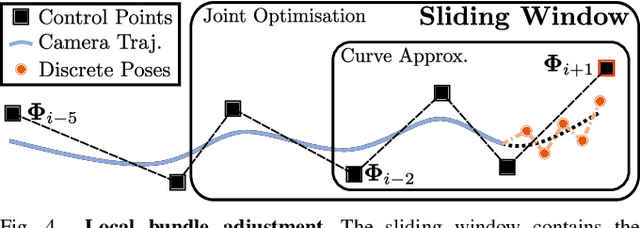
The joint optimization of Neural Radiance Fields (NeRF) and camera trajectories has been widely applied in SLAM tasks due to its superior dense mapping quality and consistency. NeRF-based SLAM learns camera poses using constraints by implicit map representation. A widely observed phenomenon that results from the constraints of this form is jerky and physically unrealistic estimated camera motion, which in turn affects the map quality. To address this deficiency of current NeRF-based SLAM, we propose in this paper TS-SLAM (TS for Trajectory Smoothness). It introduces smoothness constraints on camera trajectories by representing them with uniform cubic B-splines with continuous acceleration that guarantees smooth camera motion. Benefiting from the differentiability and local control properties of B-splines, TS-SLAM can incrementally learn the control points end-to-end using a sliding window paradigm. Additionally, we regularize camera trajectories by exploiting the dynamics prior to further smooth trajectories. Experimental results demonstrate that TS-SLAM achieves superior trajectory accuracy and improves mapping quality versus NeRF-based SLAM that does not employ the above smoothness constraints.