 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptimizing Correlated Graspability Score and Grasp Regression for Better Grasp Prediction
Paper and Code
Feb 03, 2020
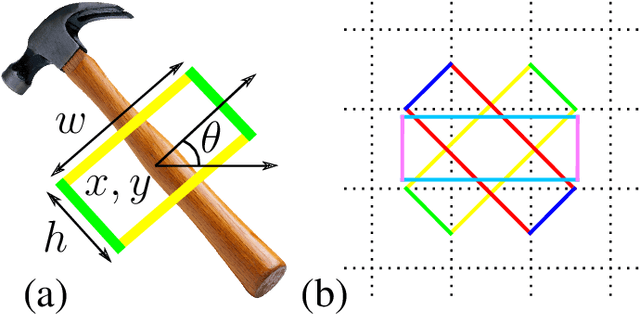
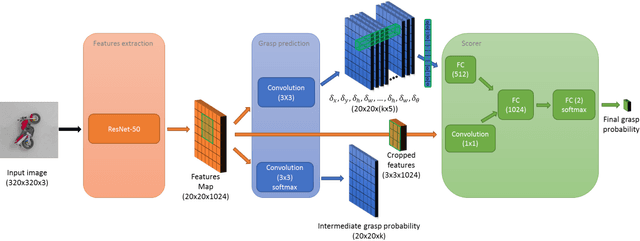
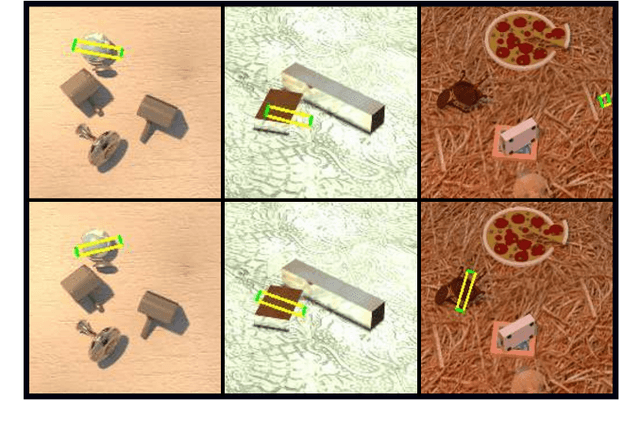
Grasping objects is one of the most important abilities to master for a robot in order to interact with its environment. Current state-of-the-art methods rely on deep neural networks trained to predict a graspability score jointly but separately from regression of an offset of grasp reference parameters, although the predicted offset could decrease the graspability score. In this paper, we extend a state-of-the-art neural network with a scorer which evaluates the graspability of a given position and introduce a novel loss function which correlates regression of grasp parameters with graspability score. We show that this novel architecture improves the performance from 81.95% for a state-of-the-art grasp detection network to 85.74% on Jacquard dataset. Because real-life applications generally feature scenes of multiple objects laid on a variable decor, we also introduce Jacquard+, a test-only extension of Jacquard dataset. Its role is to complete the traditional real robot evaluation by benchmarking the adaptability of a learned grasp prediction model on a different data distribution than the training one while remaining in totally reproducible conditions. Using this novel benchmark and evaluated through the Simulated Grasp Trial criterion, our proposed model outperforms a state-of-the-art one by 7 points.