 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptimization viewpoint on Kalman smoothing, with applications to robust and sparse estimation
Paper and Code
Mar 11, 2013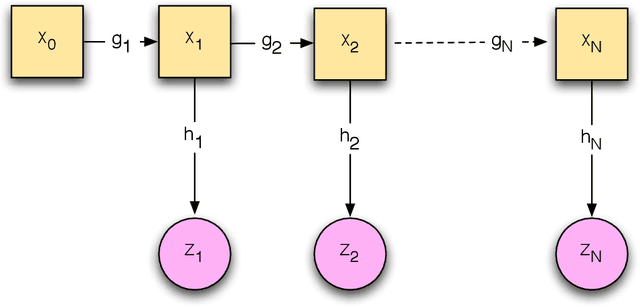

In this paper, we present the optimization formulation of the Kalman filtering and smoothing problems, and use this perspective to develop a variety of extensions and applications. We first formulate classic Kalman smoothing as a least squares problem, highlight special structure, and show that the classic filtering and smoothing algorithms are equivalent to a particular algorithm for solving this problem. Once this equivalence is established, we present extensions of Kalman smoothing to systems with nonlinear process and measurement models, systems with linear and nonlinear inequality constraints, systems with outliers in the measurements or sudden changes in the state, and systems where the sparsity of the state sequence must be accounted for. All extensions preserve the computational efficiency of the classic algorithms, and most of the extensions are illustrated with numerical examples, which are part of an open source Kalman smoothing Matlab/Octave package.