 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptimistic Online Non-stochastic Control via FTRL
Paper and Code
Apr 04, 2024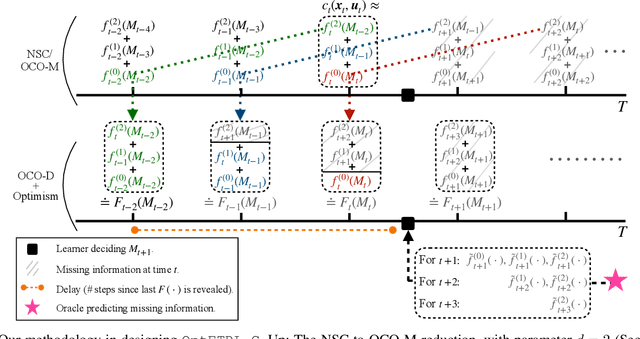
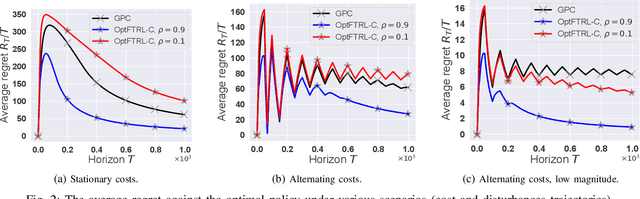
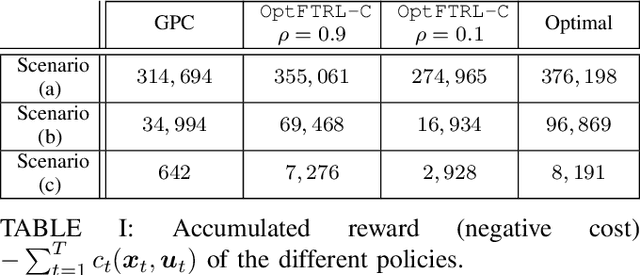
This paper brings the concept of "optimism" to the new and promising framework of online Non-stochastic Control (NSC). Namely, we study how can NSC benefit from a prediction oracle of unknown quality responsible for forecasting future costs. The posed problem is first reduced to an optimistic learning with delayed feedback problem, which is handled through the Optimistic Follow the Regularized Leader (OFTRL) algorithmic family. This reduction enables the design of OptFTRL-C, the first Disturbance Action Controller (DAC) with optimistic policy regret bounds. These new bounds are commensurate with the oracle's accuracy, ranging from $\mathcal{O}(1)$ for perfect predictions to the order-optimal $\mathcal{O}(\sqrt{T})$ even when all predictions fail. By addressing the challenge of incorporating untrusted predictions into control systems, our work contributes to the advancement of the NSC framework and paves the way towards effective and robust learning-based controllers.