 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptimal Multi-view Correction of Local Affine Frames
Paper and Code


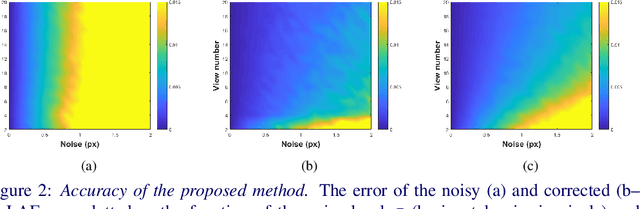
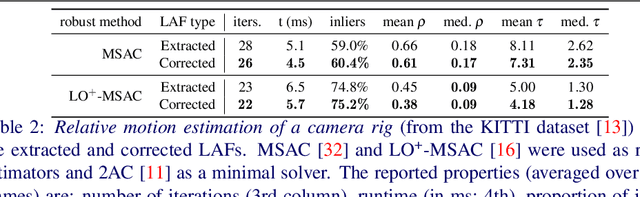
The technique requires the epipolar geometry to be pre-estimated between each image pair. It exploits the constraints which the camera movement implies, in order to apply a closed-form correction to the parameters of the input affinities. Also, it is shown that the rotations and scales obtained by partially affine-covariant detectors, e.g., AKAZE or SIFT, can be completed to be full affine frames by the proposed algorithm. It is validated both in synthetic experiments and on publicly available real-world datasets that the method always improves the output of the evaluated affine-covariant feature detectors. As a by-product, these detectors are compared and the ones obtaining the most accurate affine frames are reported. For demonstrating the applicability, we show that the proposed technique as a pre-processing step improves the accuracy of pose estimation for a camera rig, surface normal and homography estimation.