 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptimal Control of a Soft CyberOctopus Arm
Paper and Code
Oct 02, 2020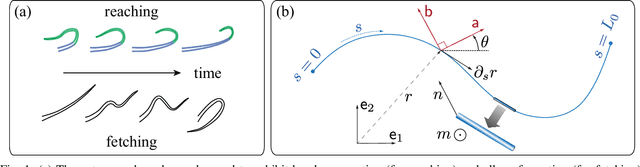
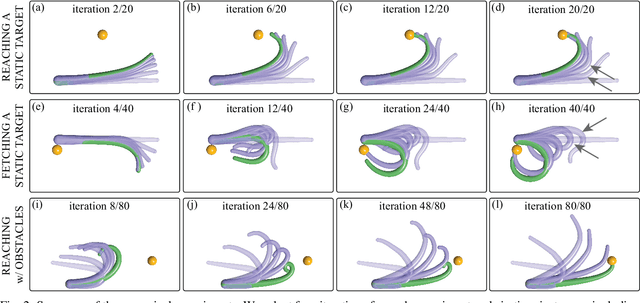
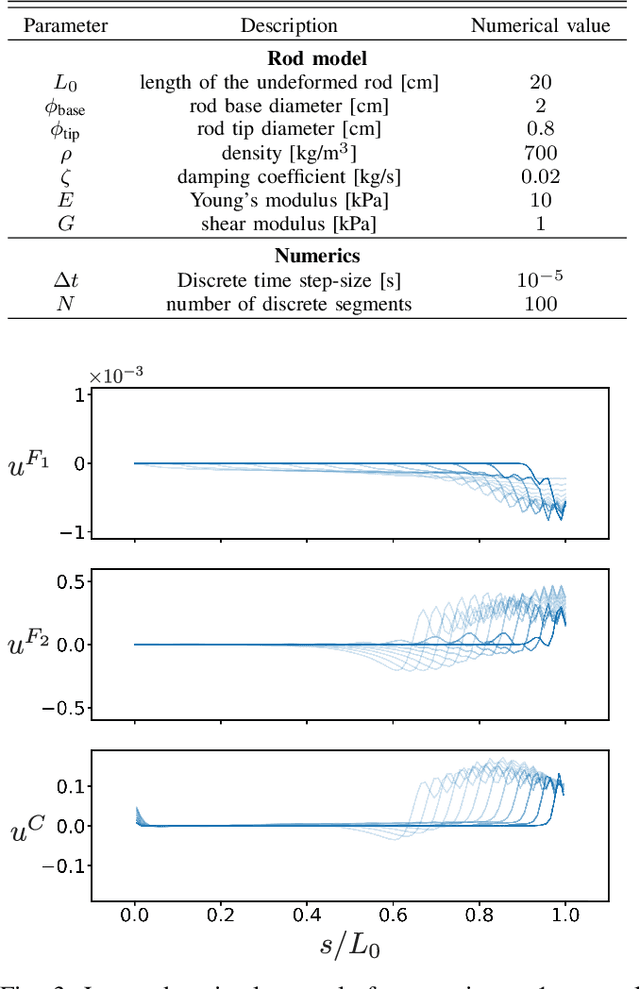
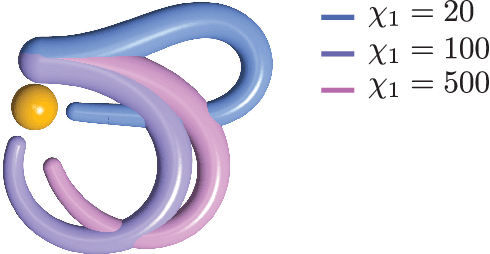
In this paper, we use the optimal control methodology to control a flexible, elastic Cosserat rod. An inspiration comes from stereotypical movement patterns in octopus arms, which are observed in a variety of manipulation tasks, such as reaching or fetching. To help uncover the mechanisms underlying these observed behaviors, we outline an optimal control-based framework. A single octopus arm is modeled as a Hamiltonian control system, where the continuum mechanics of the arm is captured by the Cosserat rod theory, and internal, distributed muscle forces and couples are considered as controls. First order necessary optimality conditions are derived for an optimal control problem formulated for this infinite dimensional system. Solutions to this problem are obtained numerically by an iterative forward-backward algorithm. The state and adjoint equations are solved in a dynamic simulation environment, setting the stage for studying a broader class of optimal control problems. Trajectories that minimize control effort are demonstrated and qualitatively compared with observed behaviors.