 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOperator inference of non-Markovian terms for learning reduced models from partially observed state trajectories
Paper and Code
Mar 26, 2021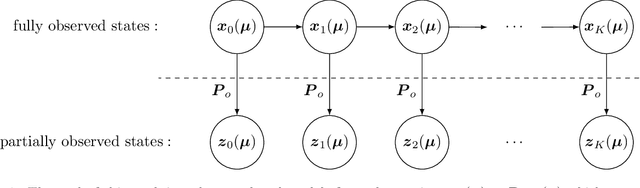
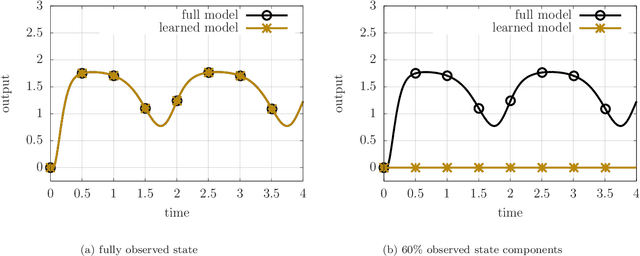
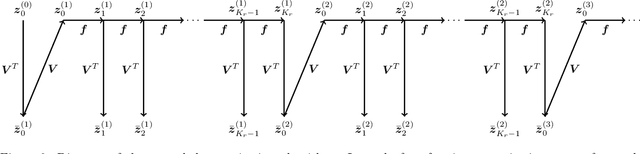
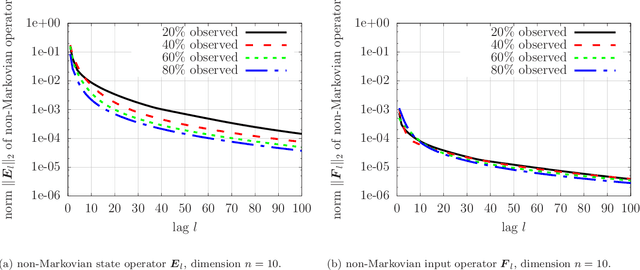
This work introduces a non-intrusive model reduction approach for learning reduced models from partially observed state trajectories of high-dimensional dynamical systems. The proposed approach compensates for the loss of information due to the partially observed states by constructing non-Markovian reduced models that make future-state predictions based on a history of reduced states, in contrast to traditional Markovian reduced models that rely on the current reduced state alone to predict the next state. The core contributions of this work are a data sampling scheme to sample partially observed states from high-dimensional dynamical systems and a formulation of a regression problem to fit the non-Markovian reduced terms to the sampled states. Under certain conditions, the proposed approach recovers from data the very same non-Markovian terms that one obtains with intrusive methods that require the governing equations and discrete operators of the high-dimensional dynamical system. Numerical results demonstrate that the proposed approach leads to non-Markovian reduced models that are predictive far beyond the training regime. Additionally, in the numerical experiments, the proposed approach learns non-Markovian reduced models from trajectories with only 20% observed state components that are about as accurate as traditional Markovian reduced models fitted to trajectories with 99% observed components.